
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
海洋潮汐模型对土耳其
GNSS估测ZTD和PWV的影响
摘要:
全球导航卫星系统(GNSS)观测可以精确地预估天气预报,而研究大气全天候对流层延迟(ZTD)和可沉淀水汽(PWV)则作为连续的全天候技术。然而,除了GNSS技术本身,ZTD和PWV的估测在土耳其中具有较大不确定性,特别是不精确的海洋潮汐模型对地球物理模型有影响。在本文中,2014年1月1日至12月31日的全球导航卫星系统数据在4个共同定位的GNSS站(GISM,DIYB,GANM和AD AN)上与来自土耳其计量局的无线电探空仪以及几个附近的IGS站进行了对比。 GAMIT/GLOBK软件已被用于使用维也纳映射功能和10°仰角切割角度处理30秒样本的GNSS数据。潮汐和非潮汐大气压力负荷(ATML)在观测水平也适用于GAMIT/GLOBK。使用几种广泛使用的海洋潮汐模型来评估其对GNSS估测的ZTD和PWV估测的影响,例如IERS推荐的来自正压流体动力学模型的FES2004,NA099b,通过TOPEX/Poseidon高度测量获得的CSR4.0,其模型为FES94.1作为参考模型和GOTOO,它再次是使用Topex/Poseidon数据在0.5times;0.5度网格上进行长波长调整的FES94.1。从无线电探空仪剖面观测得到的ZTD和PWV被认为是比较和验证的参考值。在处理阶段,采用五种不同的策略,不考虑海洋潮汐模型,分别采用上述四个海潮模型,通过与同位置无线电探空仪进行比较,分析海洋潮汐模型对GNSS估测ZTD和PWV估测的影响。结果表明,海潮模型大大影响了ZTD在厘米水平上的估测,从而分别在近岸站的毫米级的可沉淀水汽。作为ERS2,TOPEX/POSEIDON高度测量数据同化和全球潮汐测量网络数据的海洋潮汐模型FES2004,与无线电探空仪相比,具有最准确的结果,PWV在海岸线附近有plusmn;1.99 mm 。而其他海洋潮汐模型在PWV中以毫米级别彼此认同。然而,在内陆GNSS站,海浪模型对GNSS估测的ZTD和PWV的影响较小,例如ZTD为plusmn;1.0 mm,PWV为plusmn;0.1 mm。
关键词:
可降水蒸气,海洋潮汐模型,GNSS,天顶对流层延迟(ZTD)
1.简介
在GNSS气象方面,天顶对流层总延迟(ZTD)是一个必不可少的参数,可以转换为水汽。对流层延迟是卫星和车站接收机之间大气中的光学和几何路径的差异。 ZTD可以分为两个部分:干燥天顶延迟(ZHD)和天顶湿延迟(ZWD)。第一个取决于大气压力,可以直接和准确地用站的压力值计算,第二个是通过从ZTD中减去ZHD来计算的。然后将ZWD转化为可沉淀的水蒸汽(PWV)。 GNSS观测的可沉淀水汽的计算需要估测GNSS信号的天顶对流层延迟,同时通过大气传播。除了计算PWV的其他误差源,如压力,温度或ZTD,海洋潮汐效应也是错误之一(Dach和Dietrich,2000),特别是如果GNSS站在海洋附近。
准确的海洋载荷模型对于精确的大地测量定位非常重要,特别是对于次日位置(Baker等,1995)以及极坐标运动和UT1参数的确定(Scherneck和Haas,1999)。另外,由于可能使用全球导航卫星系统估测的气象和气候应用对流层延迟(例如贝维斯等人,1992;段等,1996),海洋装载必须准确建模,以提供准确的对流层延迟估测,以满足这些新应用程序的准确性要求(Dach和Dietrich,2000; Dragert等,2000)。由于GNSS站点高度和ZTD密切相关,海洋潮效应必须仔细建模,以获得可靠的ZTD以及PWV(Pacione和Vespe,2003; Jin等,2008)。
在这项研究中,海洋潮汐对GNSS ZTD和PWV的影响是通过在地中海附近的土耳其附近使用不同的海洋潮汐模型来研究的,其影响与海洋附近一样强烈(Dach和Dietrich,2000; Dragert et ah ,2000; Hatanaka等人,2001)。在第2节中,显示了数据处理和方法。第三部分介绍了一些结果,其中包括对全球导航卫星系统数据处理中具有不同OTL模型的全球导航卫星系统估测的ZTD和可降水蒸汽(PWV)的影响。最后给出结论和建议。
2.数据处理和方法
在本研究中,使用GAMIT/GLOBK软件(Herring等,2010),用限制批次最后平方反演程序来估测ZTD和其他参数。
轨道星历是从最终的国际GNSS服务(IGS)解决方案获得的。通过将ZTD参数化为Saastamoinen模型的随机变化,完成了溶液时代之间的分段线性插值(Saastamoinen,1972)。另外,允许不同程度的不确定性的先验约束。
为了研究对GNSS ZTD和PWV估测的各种影响,使用不同的处理策略,包括不同的海洋潮汐模型,如(1)作为同化TOPEX/POSEIDON高度数据和全球数据的产物FES2004潮汐测量网络,(2)来自正压流体动力学模型的NA099b,(3)以TOPEX/Poseidon高度测量法获得的CSR4.0为模型FES94.1作为参考模型;(4)再次长时间调整FES94的GOTOO。使用Topex/Poseidon数据在0.5times;0.5度网格。处理策略的完整列表如下表1所示。
对于映射函数,在本研究中,仅使用新的维也纳映射函数(VMF1)。 Boehm和Schuh(2006)已经指出,VMF的系数是通过实际气象数据(ECMWF全局数据)通过光线追踪得出的,而不是使用无线电探空仪数据的最佳拟合值(按照NMF)或只是一些大气参数(如IMF)。
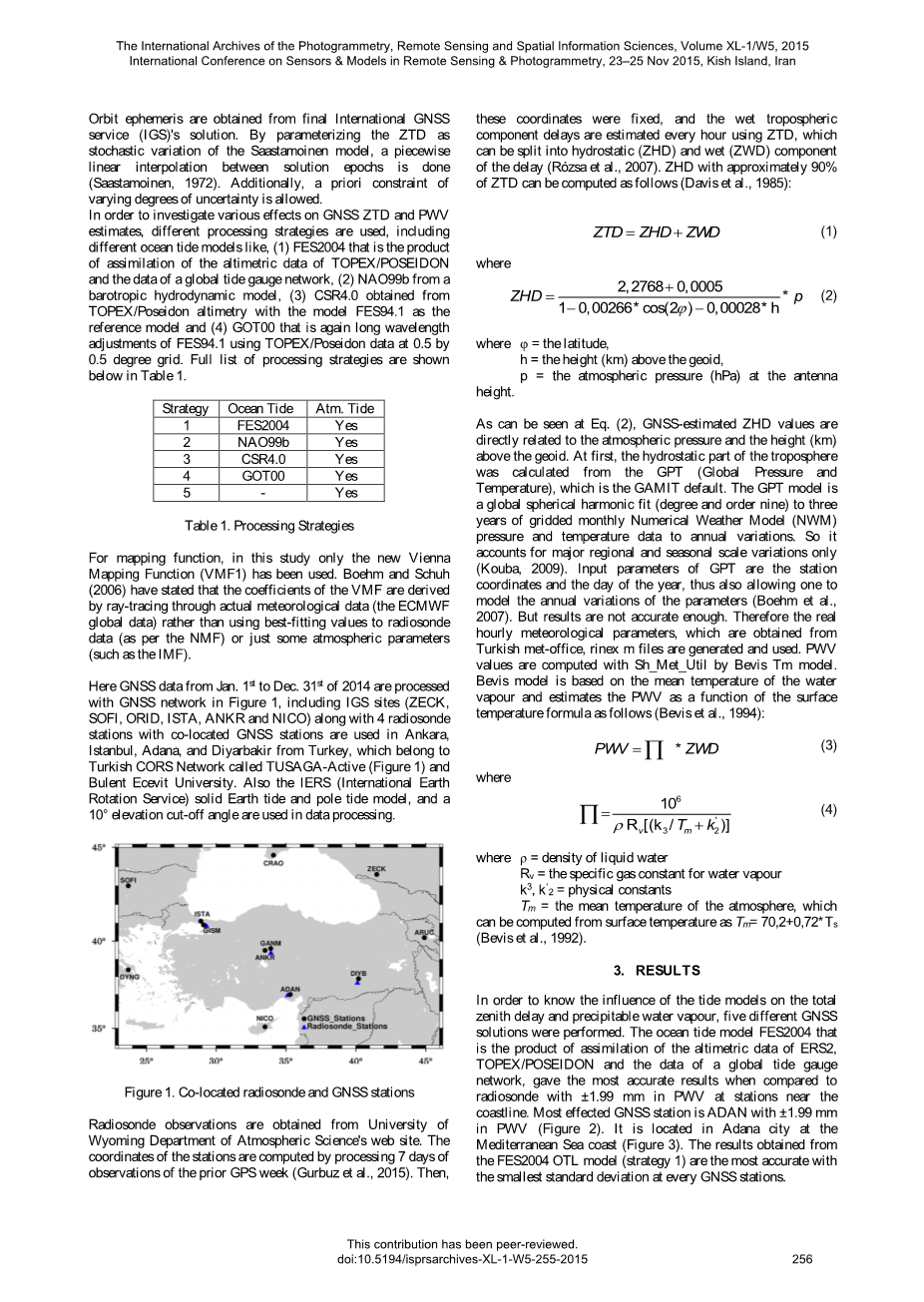
图1中,全球导航卫星系统数据从2014年1月1日至12月31日在GNSS网络中进行处理,其中包括IGS站点(ZECK,SOFI,ORID,ISTA,ANKR和NICO)以及4个具有同位置GNSS站的无线电探空站用于土耳其的安卡拉,伊斯坦布尔,阿达纳和迪亚巴克尔,属于土耳其CORS网络,名为TUSAGA-Active(图1)和Bulent Ecevit大学。还有IERS(国际地球旋转服务)固体地潮和极潮模型,以及10°仰角截止角度用于数据处理。
无线电探空仪的观测资料来自于怀俄明大学大气科学系的网站。通过处理7天的GPS周的观测来计算站的坐标(Gurbuz等,2015)。然后,这些坐标是固定的,并且使用ZTD每小时估测湿对流层分量延迟,其可以被分解成延迟的静水压(ZHD)和湿(ZWD)分量(Rozsa等人,2007)。具有约90%的ZTD的ZHD可以如下计算(Davis等人,1985):
这里有
其中
=纬度,
h =大地水准面上方的高度(km),
p =天线高度处的大气压(hPa)。
从方程(2)可以看出,GNSS预估的ZHD值与大气压力之间的大气压力和高度(km)直接相关。首先,对流层的静水压部分是从GPT(全球压力和温度)计算出来的,这是GAMIT默认值。 GPT模型是全球球面谐波拟合(度数和阶数九)到三年格网的每月数值天气模型(NWM)压力和温度数据到年度变化。因此,它仅占主要的区域和季节性尺度变化(Kouba,2009)。 GPT的输入参数是站坐标和一年中的日期,因此还可以对参数的年度变化进行建模(Boehm等,2007)。但结果不够准确。因此,从土耳其会议室获得的真正的小时气象参数是生成和使用的。 PWV值由Bevis Tm模型的Sh Met Util计算。贝维斯模型基于水蒸气的平均温度,并将PWV作为表面温度方程的函数估测如下(Bevis等,1994):
这里有
其中
p =液体水的密度
Rv =水蒸汽的比气体常数
k3,k2 =物理常数
Tm =大气的平均温度,其可以从表面温度计算,如Tm = 70,2 0,72 * TS(Bevis等人,1992)。
3.结果
为了了解潮汐模型对总天顶延迟和可沉淀水汽的影响,进行了5种不同的GNSS解决方案。与ERS2,TOPEX/POSEIDON和全球潮汐测量网络数据同化的海洋潮汐模型FES2004,与无线电探空仪相比,具有最准确的结果,PWV附近的站点为plusmn;1.99 mm海岸线。最受影响的GNSS站是PWVplusmn;1.99 mm的ADAN(图2)。它位于地中海海岸的阿达纳市(图3)。从FES2004 OTL模型获得的结果(策略1)在每个GNSS站点具有最小的标准偏差最准确。
作为位于迪亚巴克尔的DIYB站的例子,GNNS估测的PWV值与无线电探空仪的PWV值有很好的一致性(图4)。然而,与ADAN车站相比,位于安卡拉市的GANM车站的标准偏差较低。
伊斯坦布尔市的GISM站也受到黑海和马尔马拉海海洋潮汐影响,对PWV值的影响(图5)达到1-2毫米(Gurbuz等,2015)。虽然位于安卡拉市的GANM站位于土耳其内陆地区(图6和图7),但没有这样的效果。
从图6和图7可以看出,两种不同解决方案之间的标准偏差在ZTD上具有PWV和毫米级的亚毫米级协议。这也是像GANM这样的内陆地区。
类似于Wei等人(2012)的声明,FAN2004,GOTOO,NA099b和CSR4.0解决方案之间没有明显的区别,如内陆GNSS站,如GANM和DIYB(图8)。然而,在靠近海岸线的ADAN,GISM等车站,这种情况是不同的。
4.结论
使用不同的OTL模型(FES2004,NA099b,CSR4),研究了OTL模型对GNSS预估的ZTD和PWV的影响,并与土耳其4个共同驻地的无线电探空仪PWV进行了比较。 0和GOTOO)在数据处理中,ZTD差异的标准偏差始终优于土耳其海岸线附近站点的OTL模型。然而,对于靠近海岸线的车站,不同OTL车型之间存在明显差异。
与海洋线附近车站的PWV相比,无线电探空仪与无线电探空仪相比,TOPEX/POSEIDON高度测量数据的同化和全球潮汐测量网络数据的海洋潮汐模型FES2004得到最准确的结果。然而,在内陆GNSS站,海浪模型对GNSS估测的ZTD和PWV的影响较小,例如ZTD为plusmn;1.0 mm,PWV为plusmn;0.1 mm。因此,潮汐模型仍然应该用于海上附近的GNSS站。因此,在从气象应用的GNSS测量中估测ZTD和PWV参数时,必须适当使用海洋潮汐模型。
致谢
作者感谢IGS提供高精度的GNSS观测数据和产品。这项工作得到了TUBITAK-CAYDAG项目编号112Y350的支持。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27082],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 基于激光雷达点云分割和高光谱指标提取的城市森林树种分类外文翻译资料
- 通过形态学图像分析从Uav 多光谱图像自动识别作物树冠外文翻译资料
- 饮用水水源地保护区景观格局变化、保护措施及土地利用/ 土地覆被变化:以丹江口水库为例外文翻译资料
- 饮用水源保护区景观格局变化、保护措施及土地利用/土地覆被变化——以中国丹江口水库为例外文翻译资料
- 基于RANSAC和三维参考的激光平面重建方法外文翻译资料
- 使用无人机倾斜摄影进行3D建模技术的研究外文翻译资料
- 无人机倾斜摄影测量技术的未来前景外文翻译资料
- BDS/GPS相对定位长基线与无差别观测外文翻译资料
- RINEX格式的GPS观测值的周跳检测,校正和相位调整外文翻译资料
- 无缝三维相似变换的通用高效算法和精度评估外文翻译资料

