
英语原文共 4 页,剩余内容已隐藏,支付完成后下载完整资料
基于模糊规则的过饱和交叉口的交通信号控制系统
摘要
本文提出了一种基于模糊规则的控制系统。该控制系统控制交通信号,用于调节过饱和交叉口的车流量并对左转和右转进行整合。基于模糊规则,系统决定是否延长目前的绿色信号或终止它。控制系统还可以控制紧急车辆的连续和安全的流动。
关键词:模糊控制器;交通管制;周期;排队长度;紧急车辆
一.简介
近几年车辆数量的增加和交通运输需求的增长,城市街道和高速公路经常面临严重的交通拥堵问题。由于这个因素,交通信号现在已成为控制交通繁忙的城市的共同特征。仔细规划这些信号对提高道路交通流量的效率至关重要。控制过饱和交叉路口的交通是一个大问题。
传统的交通信号控制方法基于精确的模型不能有效地处理复杂和变化的交通情况。他们是基于预先设定的周期时间来改变信号,没有任何交通状况分析。由于固定的周期时间,这样的系统不考虑哪个路口有更多的交通负荷,所以应该保持绿色或提前终止,然后完成循环时间。在十字路口的情况下,传统的控制系统仅考虑信号在不同方向上的等待时间,而不考虑车辆方向。这种情况可以在卡拉奇的不同地区看到,如Shahrah-e-Faisal,由于该路线上的办公室数量众多,交通流量在不同时间不同,早晚时间交通繁忙。此外,在不同的交汇处,在学校时间和其他日常时间,交通流量会突然发生改变。预设周期时间控制器在这种情况下会失败,因为他们无法得到完整的车辆信息。另外,有时会出现一些VIP运动,交通流量必须转移和控制不同的交叉路口。在这种情况下,由于决策目标不明确,使得人类决策效率空前提高。
在这种情况下,基于模糊逻辑的控制器被证明是交通系统的良好管理者。模糊控制器即使使用不完整的信息也能够做出决定。越来越多的复杂控制器正在开发用于交通控制。这些算法通过减少车辆对信号的等待延迟来不断提高安全性和效率。这增加了前进的速度,从而使信号更加有效,使交通更加流畅。
交通信号控制中模糊逻辑的关键动机是信号控制的不确定性。基于不精确的信息作出决定,评估的效果不为人所知。
本研究的目的是设计一个基于模糊规则的系统,用于具有左右转弯的饱和交叉路口。 此外,该系统控制紧急车辆的连续流动。
在早期的研究中,模糊控制器不会同时考虑左右转弯。Lin Zhang和Honglong Li开发了用于过饱和交点的模糊交通控制器。他们设计了一种算法来控制含左转的双向街道过饱和交叉口。
Jee Hyong Lee和Hyung Lee Kwang还设计了一个模糊控制模型。控制器的目标是降低整个交通网络中的平均时延。他们认为交叉路口右转车道的特殊设施允许右转车流量通过交叉路口,而不影响同一交叉路口的其他交通流量。 在这种假设下,右转车流量不在模糊控制的考虑之列。
在本文中,所有这些限制和假设已被删除。这项工作不仅包括直行和单一的转弯,还包括所有单,左,右转弯。此外,本文将紧急车辆的控制与交叉口控制算法相结合,为这些车辆驶向目的地提供平稳的流量。这是以前没有考虑过的。由于警车或救护车需要冲出车流,紧急车辆控制已纳入本研究。紧急车辆突然进入后信号应始终为绿色。
本文介绍了一种基于模糊规则的方法,旨在调节过饱和交叉口的交通流量。模糊控制器决定是否终止当前绿色信号或延长一段时间。 这些评估是使用一组模糊规则进行的。 这些规则考虑了当前绿色信号的排队长度和到达速率并比较了等待信号。 在本文中,规则不仅基于“当前绿色信号到达率”,而且还考虑了“相对信号的到达率”。 在Lin Zhang和Honglong Li研究中,仅考虑了当前绿色信号的到达率。在这里,通过添加新参数并使成员函数更加精确和复杂,使规则更准确。 这样做是为了实现更加严格的结果和有效整合紧急车辆控制。
模糊逻辑技术允许实现与人类想象的方式相似的现实生活规则。 在交通控制系统中,为了控制某一交界处的交通情况,人们会以以下方式思考:“如果北或南车道交通较重,西或东车道交通较少,则交通灯应为南北通道留绿色更长。这样的规则现在可以容易地容纳在模糊逻辑控制器中。在这个考虑中,我们可以说交警人员是可以替代的。 与Pretimed Controller相比,模糊逻辑在不同方向的交通流量高度不均匀时发光。
二、文献综述
交通流通常具有随机性和不确定性。模糊逻辑非常适合于建模和控制这样的问题。自20世纪70年代以来,模糊逻辑在交通信号控制中得到了广泛的应用。
设计模糊交通控制器的第一个尝试是在70年代由Pappis和Mamdani进行的。 之后,Niittymaki、Kikuchi和Chui等研究人员开发了不同的算法和逻辑控制器来规范交通流量。
Kelsey和Bisset还设计了一个用于信号控制的模拟器,该模拟器用于一个车道的独立交叉路口。 Niittymaki和Pursula也做了同样的工作。他们观察到,当交通量很大时,模糊控制器减少了车辆的延迟。
Niittymaki和Kikuchi为行人开发了基于模糊逻辑的过马路算法。
Nakatsuyama、Nagahashi和nishizuka以单向运动来控制动脉上的两个相邻的十字路口。开发了基于上游流量的模糊控制规则,以确定是否延长或终止下游交叉口的绿色信号。
Chui是第一个使用模糊逻辑来控制多个路口交通的人。在这样的尝试中,只评估两个街道,不考虑任何转弯。
近年来,Lin Zhang和Honglong Li也致力于为过饱和交叉点设计模糊交通控制器。
Jee Hyong Lee和Hyung Lee Kwang方向变化的交通信号控制,但前提是假设交通流量不会扰乱交叉路口中的任何其他交通流量。
三、模糊逻辑
模糊逻辑(FL)的概念是由加利福尼亚大学伯克利分校教授Lotfi Zadeh设想的,不是作为一种控制方法,而是作为一种处理数据的方法,允许部分的集合关系而不是清晰的成员资格或非成员.FL是一种解决问题的控制系统方法,适用于从简单,小型,嵌入式微控制器到大型,网络化,多通道PC或基于工作站的数据采集和控制系统的系统中的实现。 它可以在硬件、软件或两者的组合中实现。
FL提供了一种基于模糊,含混,不精确,嘈杂或缺少输入信息得出明确结论的简单方法。FL控制问题的方法模仿一个人如何做出决定,只有更快。 FL可以从小型手持产品到大型计算机化过程控制系统建成。它使用不精确但非常描述性的语言来处理输入数据,就像人类操作者一样。 它非常强大和宽容的操作员和数据输入,并且通常在第一次实施时很少或没有调整。
四、模糊交通信号控制
使用模糊方法的目的是对专家的思考模拟出这种现象的精确数学模型,但这种发展是非常困难甚至不可能的。事实上,模糊逻辑在交通信号控制中的主要目标,在交通信号控制方面一般如下:
1.改善交叉口的交通安全。
2.最大化交叉口的容量。
3.尽量减少延误。
4.澄清交通环境。
5.影响路线选择。
五、方法
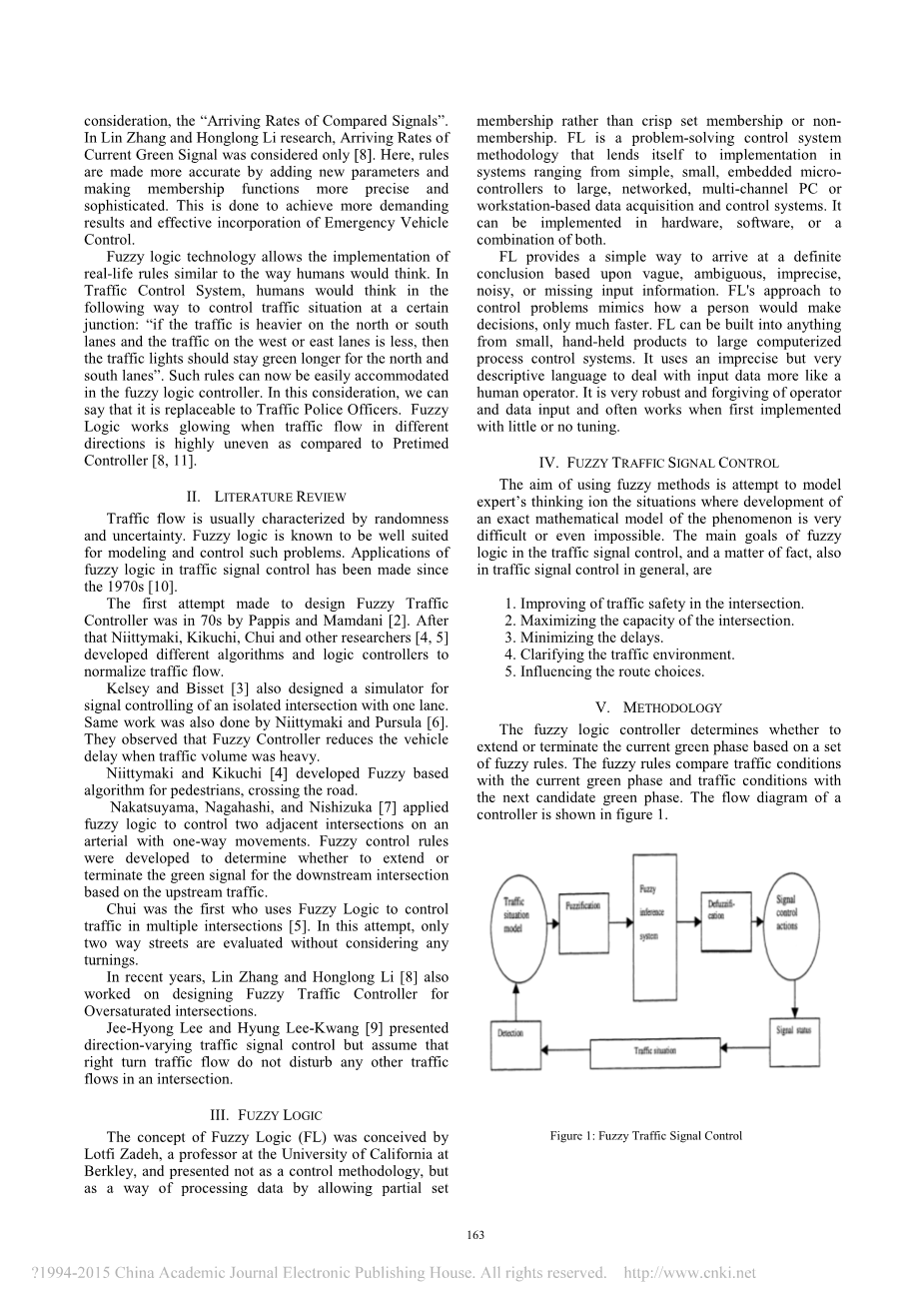
模糊逻辑控制器基于一组模糊规则来确定是否扩展或终止当前绿色阶段。模糊规则将交通状况与当前绿色阶段和下一个候选绿色相位的交通状况进行比较。控制器的流程图如图1所示。
图1:模糊交通信号控制
周期时间表示当前信号为绿色的周期。 如果周期时间小,则表示通常是绿色信号的时间,即在正常情况下; 每个信号的周期时间小。 如果交通情况需要扩展,那么可以延长到长时间的延伸。 如果周期时间是中等的,则表示一些扩展已经完成,现在不能进行长时间的扩展。 如果周期时间已经很大,那么不管怎样,都不允许扩展。 这样做是为了避免任何信号的饥饿。 在大的周期时间的情况下,只有当紧急车辆处于当前的绿色信号时才允许短延长。
应急车辆的控制是通过调查他们的存在来完成的。 如果紧急车辆处于当前绿色信号,则只能扩展短信号。当有情况时,紧急车辆都处于当前信号,任何其他信号都会延长当前信号。如果紧急车辆处于非绿色信号,则终止当前信号。
六、模糊参数及其隶属函数
控制参数设置为:
EV =紧急车辆
CT =当前绿色信号的周期时间
QC =当前绿色信号的队列长度
QN =下一个信号的队列长度为绿色
ARC =当前绿色信号的到达率
ARN =下一个信号的到达率为绿色
CS =电流信号
NS =下一个信号
表1:输入和输出变量及其成员函数。
七、模糊规则集
模糊控制器根据规则集确定当前绿色信号的扩展。 这些规则将在周期时间的基础上发挥不同的作用。 如前所述,默认情况下,每个信号的周期时间为“小”。 小CT扩展将会有一定的规定。 “小”CT将允许扩展到“长”。 如果循环时间为“中”,则显示它已经有一些扩展,因此信号只能扩展到“中”。 如果已经是“大”的循环时间,则仅在紧急车辆存在的情况下才能进行扩展。 当紧急车辆处于任何信号状态时,它将忽略所有其他交通因素,并将给予该信号延长。
其中一些规则如下所示:
1.如果CS中存在EV,则短延长。
2.如果NS中存在EV,则零延长。
如果CT是“中”,则扩展可以是“零”,“短”或“中”,不延长。
- QC为V低,ARC为低电平,零延长。
4.QC为中等,ARC为低,QN为中,ARN为高,零延长。
5.QC为V高,ARN为低,QN为低,中延长。
如果CT为“小”,则扩展集中的所有值都可能,即扩展可以进行“长延时”。
6.QC为V低,ARC为中等,QN为V低,短延长。
7.QC为L低,ARC为高,ARN为低,QN为低电平,长延长。
8.QC为高电平,ARC为低电平,QN为V高电平,零延长。
QC为V高,ARC为高,QN为中,长延长。
QC为V高,QN为V低,长延长。
八、用于智能交通灯控制的常规技术
A、专家系统
专家系统使用一组给定的规则来决定下一个动作。 专家系统可以通信以允许同步。 网络上的性能取决于所使用的规则。 对于每一个交通信号灯控制器,可以通过分析每个规则触发的频率及其成功程度来优化一组规则。 系统甚至可以学习新的规则。
B、进化算法
taale比较使用进化算法的进化策略,进化为一个单一的模拟十字路口交通灯控制器使用常见的荷兰交通灯控制器。他们没有在多个耦合的十字路口尝试他们的系统,因为这样的交通节点网络的动态更加复杂,学习或创建控制器可以显示更多有趣的行为和研究问题。
C、强化学习
Thorpe首先研究了交通灯控制的加强学习,但Thorpe的方法与本文的方法不同。 他使用基于交通灯的价值函数,我们使用一个基于汽车的价值函数。Thorpe使用神经网络作为基于交通灯的价值函数,该功能预测了站在交界处的所有轿厢的等待时间。 神经网络用于根据等待车辆的数量以及自上次改变以来的时间来预测每个决策的Q值。 目标状态是没有汽车等待的状态。Thorpe训练了一个单一的交通灯控制器,并通过在4*4交通信号灯的网格上实例化进行了测试。该系统在具有不同速度的现实模拟中胜过固定和基于规则的控制器。
九、结论
本文提出了一种针对全交叉路口和左右转弯车道的基本模糊逻辑控制算法,模糊逻辑控制器根据一组模糊规则和实时交通信息,决定当前绿灯相位的扩展范围。
未来计划进行大量改进,包括以下内容:
1.对具有不同级别的几何复杂度,相位和需求的交叉点进行额外的模拟测试。
2.循环时间可能进一步模糊,以获得更好的结果。
3.将模糊逻辑控制器策略扩展到动态和网络应用。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[27700],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

