英语原文共 5 页,剩余内容已隐藏,支付完成后下载完整资料
飞行管理系统中垂直轨迹预测的设计与仿真
摘要:FMS是现代民用航空电子系统的核心。随着PBN在世界各地蔓延,轨迹预测功能成为FMS的重要组成部分。垂直预测支配其通过使用性能模型计算飞机的状态预测步骤。本文分析的核心功能和FMS数据库如何相互配合,以计算预测的轨迹,并示出了垂直预测和横向之一之间的关系。随着简介在计算中使用的性能模型,典型的垂直分布和垂直预测程序阐述了在后面的章节。最后,该算法的精确性,证明与来自拉萨飞行模拟到林芝。
1、介绍
飞行管理系统起着在现代航电系统中的核心作用。自20世纪70年代诞生以来,FMS集成了许多功能,如飞行计划,业绩计算,导航和指导,协助飞行机组与地面准备飞往进近和着陆的所有阶段。
国际民航组织公布,促进了基于性能的导航(PBN),轨迹预测成为FMS的重要组成部分。给定飞行计划和气象预报,其包括竖直轨迹预测计算的预测的四维飞行轨迹是从传统的二维飞行计划腿不同的预测函数。垂直轨迹预测可以基于机身和发动机的性能模型在整个飞行过程中提供的时间序列的各种飞机状态。这使FMS在未来的导航和空中交通管理的主要球员。
在本文介绍的垂直轨迹预测算法已经被证明在模拟实验准确,有效,并已在C919 RNP验证要求的程序被使用。本文的结构安排如下。第二节将介绍的FMS的功能结构和垂直预测和横向之一之间的关系。然后,第三节将简要地描述了用于计算性能模型。垂直剖面和垂直预测程序的制定将在第四节显示。最后,模拟将在第五节介绍。
*这项工作是由中国高科技863的编号2001AA415340号和第2007AA04Z1A6,中国自然科学基金的编号61174168号,中国航空科学基金20100758002号和2012805800号发起的。
霍延在北京清华大学自动化系导航与控制研究中心,100084 P.R.China(电子邮箱:
程龙是北京清华大学自动化系的教授,并且也是西安飞行器控制科学技术研究室和自动飞行控制研究所的教授(电子邮箱:ncheng@tsinghua.edu.cn)
李青,北京清华大学自动化系教授(电子邮箱:liqing@tsinghua.edu.cn)
2、垂直轨迹预测柔性制造系统
- FMS的功能结构
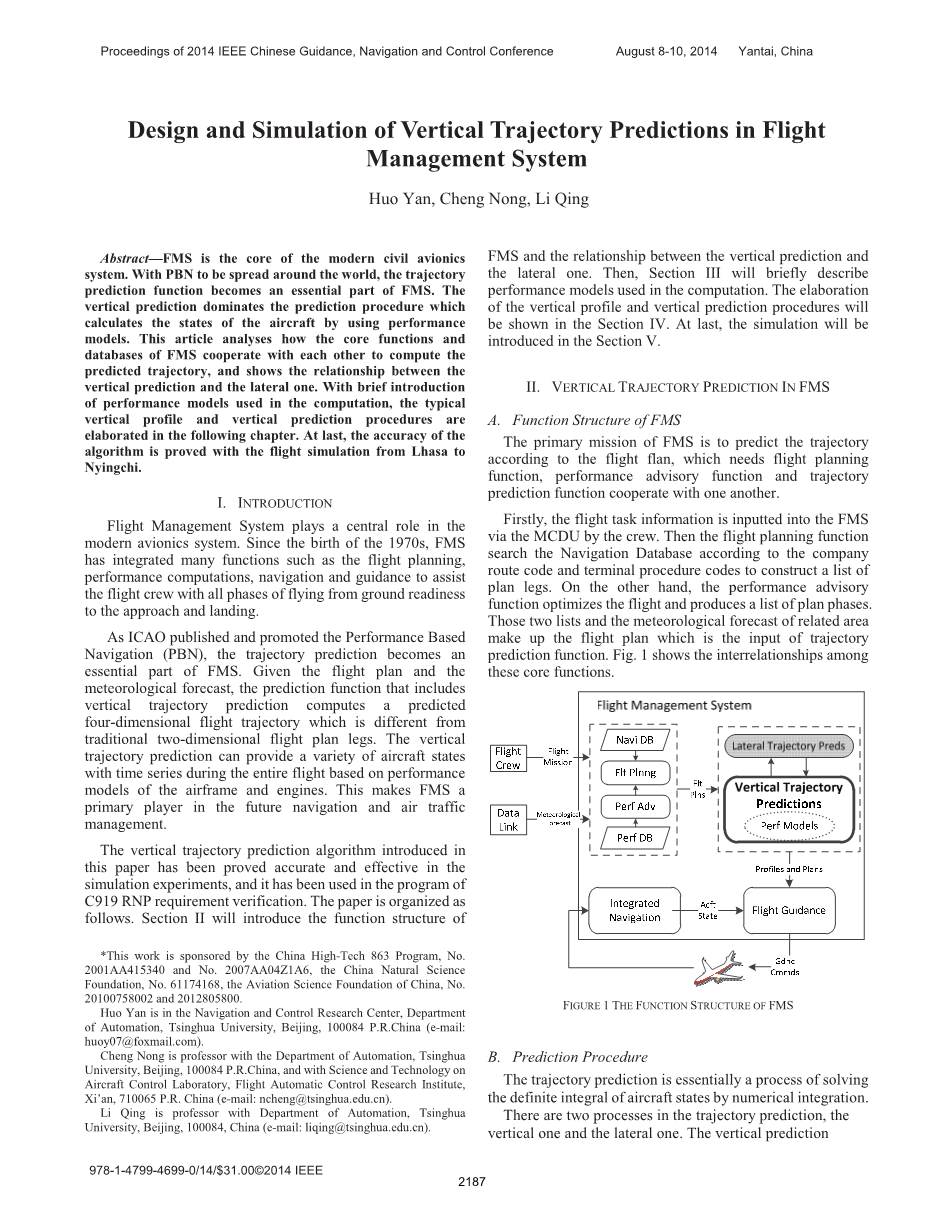
FMS的主要任务是根据飞行模型,性能咨询职能和轨迹预测功能相互合作来预测轨迹。这需要飞行规划功能。
首先,飞行任务信息是通过由乘员在MCDU输入到FMS。然后飞行计划功能,根据公司航线代码和终端程序代码来构建计划的腿列表搜索导航数据库。另一方面,性能咨询功能优化的飞行,并产生计划。这两个列表及相关区域的气象预报弥补了飞行计划是轨迹预测函数的输入。图1显示了这些核心功能之间的相互关系。
B.预测程序
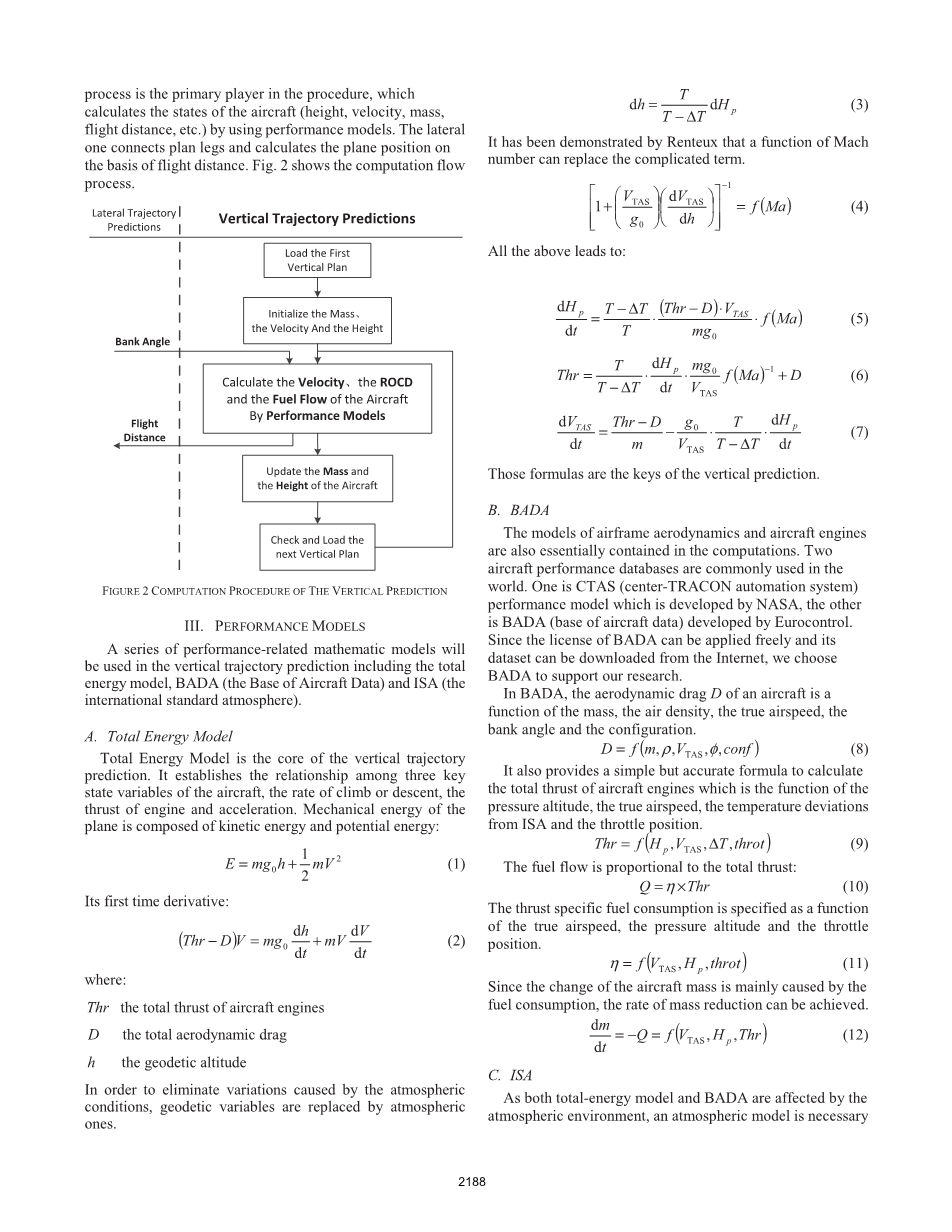
轨迹预测实质上是由数值积分求解飞机状态的定积分的处理。
在轨迹预测中,有垂直的和横向的两个进程。垂直预测处理是在程序,其通过使用性能模型计算飞机的状态(高度,速度,质量,飞行距离,等)的主播放器。横向1个连接计划腿,并计算飞行距离的基础上的平面位置。图2示出的计算流程。
3、性能模型
一系列与性能相关的数学模型将在垂直轨迹预测包括总能量模型,BADA和ISA(飞机数据的基础)(国际标准大气)中使用。
- 总能量模型
总能量模型是垂直轨迹预测的核心。它建立中的飞机三个关键状态变量的关系,爬升或下降的速率,发动机和加速度的推力。平面的机械能由动能和势能的:
这是第一次导数:
为了消除由大气条件的变化,大地测量变量被大气所取代。
Renteux已经证实该马赫数的函数可以代替复杂术语。
以上所有公式引出:
这些公式是垂直预测的关键。
B、BADA
机身空气动力学和飞机发动机的模型也必须包含在计算中。两种飞机性能数据库,在世界常用。一种是由NASA开发的CTAS(中心TRACON自动化系统)性能模型,另一个是BADA由Eurocontrol开发(飞机数据的基础)。自BADA的许可证可以自由地应用于其数据可以从互联网上下载,我们选择BADA来支持我们的研究。
在BADA中,飞机的气动阻力D实现的是质量,空气密度,真空速,倾斜角和配置的功能。
也提供了一个简单而准确的公式来计算飞机发动机它是压力高度的功能,真正的空速,从ISA的温度偏差和油门位置的总推力。
燃料流成比例的总推力:
推力燃料消耗被指定为真空速的函数,气压高度和节气门位置。
由于飞机质量的变化主要是由燃料消费,质量减少率可以达到。
C、ISA
由于两个总能量模型和八达由大气环境的影响,大气模型是必要的,以计算出的温度,密度和空气的压力的平面周围。
空气的温度和压力被高度和ISA偏差来确定。
然后可以得到密度
给出的大气条件下,真实空速可以转换为校准空速或者马赫数。
4、竖直轨迹预测
- 典型的竖直剖面
虽然横向分布在不同的飞行路线发生变化,在垂直剖面为或多或少是相同的。一个典型的垂直轮廓保持在FMS。性能咨询功能只是调整都是基于参数优化的一些曲线参数。
有21个阶段在图3中显示的整个飞行:1。在跑道上的最大推力油门加速; 2.达到CAS V1 *时,起飞; 3.当齿轮被完全缩回,爬在固定CAS V2 *; 4.400英尺加快平整; 5.当达到CAS V3 *,收襟翼爬配置,并在V3攀升; 6.2000英尺平整加快; 7.达到250KN时,收襟翼清洁配置和在250千牛上升; 8.万英尺平整加快; 9.达到CAS V4 *的时候,爬在V4; 10.达到马赫V5 *的时候,爬在V5; 11.在巡航高度H *巡航推力平整; 12.当达到下降顶点,下降马赫V6 *同血统的推力; 13.达到CAS V7 *时,在下降V7; 14.在万英尺平整和速度降下来; 15.when CAS V8 *到达,在下降V8; 16.在8000英尺平整和速度降下来; 17.达到CAS V9 *时,切换到配置方式和V9下降; 18.在3000英尺平整和速度降下来; 19.达到CAS V10 *时,切换到着陆形态,并在V10下降; 20.达到2000英尺时,延长齿轮; 21.降落。带星号的上述变量是由性能咨询功能提供的参数。
B、垂直轨迹预测程序
21阶段将分为三种情况:
修复油门和指定的速度。在这种情况下,发动机在一个固定节流和飞机爬升工作,并在指定的速度不受限制下降。
修复油门和指定ROCD。发动机在固定节流工作,或飞机加速在指定ROCD下来无限制。
指定的速度和ROCD。可以从他人不同,而自动节流阀提供了必要的推力速度和ROCD控制。
这三种情况的计算程序阐述如下。
- 固定节流和比转速
首先,制定出平面之间的大气温度,压力和密度。其次,推力和阻力是由BADA模型计算。然后,ROCK可以从推力和阻力按总能量模型来获得。最后,下一个距离,质量和高度与指定的积分时间步长计算的。
- 固定节流和指定ROCD
前两个步骤与上述相同。固定dVTAS被选定为变速段融合的一步。空速的变化率是由总能量模型来确定,然后可以得到其他数据。
(3)专项速度及ROCD
这种情况下,通常用于方式。速度和强迫症由自动飞行控制系统控制。因此,根据需要调整推力。由于海拔高度应该在办法过程中更加重视,dHp 被选为整合的一步。
另一个典型的应用是巡航。随着瞬态省略,无论是速度和高度是恒定的,推力等于阻力。巡航段通常集成基于固定时间的步骤,其他国家的计算方法如下:
- 模拟
模拟从拉萨飞行到林芝被选择来验证竖直轨迹预测算法的效率和准确性。整个飞行由三个终端的程序(DM09L,LEDIM和R05)和路线(W500)。
起初的飞行任务,输入到由MCDU在FMS。然后垂直轨迹预测功能与横向之一计算该预测的四维轮廓合作。最后,飞行任务是由是由代尔夫特理工大学研制的B747机型执行。
图8显示了飞行模拟,其中,黄线痕断开的预测轨迹。很明显地看到,飞机几乎是沿着预测轨迹飞行。图9示出了整个飞行轨迹(白线)和预测的一个(红线)。两行彼此一致。两者的数字证明的算法的准确度。
- 总结
飞行轨迹的预测是在FMS的功能中心。准确预测协助执行飞行任务飞行机组,这是从根本上实现自动空中交通管制。本文介绍的算法是能够计算的航班的预测四维轨迹。使用总能耗模型,BADA和ISA,该算法可以在整个飞行过程中与时间序列计算出飞机的状态。国家信息有助于提高安全性和航班正点率。该算法被证明在准确,有效模拟实验,并且已经在C919 RNP要求验证的程序中使用。
参考文献
[1] Li Dachuan, Cheng Nong, Li Qing, Song Jingyan, “AFDX based
simulation of flight management system,” Journal of Beijing
University of Aeronautics and Astronautics, vol. 37, no. 7, pp 861-7,
876, 2011 (in Chinese).
[2] Spitzer, C. R., amp; Spitzer, C. (Eds.). (2000). Digital Avionics Handbook.
CRC Press.
[3] Nuic, A. (2012). User Manual for Base of Aircraft Data (BADA).
Eurocontrol Experimental Centre, Cedex, France, revision, 3.10.
[4] ARINC Characteristic 702A-3. Advanced Flight Management
Computer System. 2006.
[5] ARINC Specification 424-18. Navigation System Data Base. 2005.
[6] Guo Yuntao, Zhu Yanbo, and Huang Zhigang, “Study on Key
Trajectory Prediction Techniques of Civil Aviation Aircraft,” Journal
of Civil Aviation University of China, vol. 25, no. 1, pp 20-24, Feb.
2007 (in Chinese).
[7] Lu Yiyu, Tang Xinmin, and Xu Qin, “Trajectory Prediction Based on
Dynamic Weather Forecasting Data,” Aeronautical Computing
Technique, vol. 43, no. 4, pp 34-38, Jul. 2013 (in Chinese).
[8] Qi Lin, Liang Bin, and Cheng Nong, “Real-time Simulation of Flight
Management System,” Journal of System Simulation, vol. 20 suppl., pp
333-336, Aug. 2009 (in Chinese).
[9] Airbus, “Getting to Grips with Aircraft Performance,” Jan. 2002.
[10] Renteux, Jean-Louis. “Aircraft Modelling Standards for Future ATC
Systems.” EUROCONTROL Division E1 Document 872003 (1987).
[11] Edwards, Christopher, Thomas Lombaerts, and Hafid Smaili, eds. Fault
tolerant flight control: a benchmark challenge. Vol.
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[31112],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

