
英语原文共 21 页,剩余内容已隐藏,支付完成后下载完整资料
自动调平凸轮机构爬梯轮椅的设计
摘要
本文介绍了一种能爬楼梯的新型轮椅——“q型轮椅”。得益于行星轮系结构的机械腿和车轮组合运动装置的运用,这种轮椅能够攀爬障碍物或是楼梯。这项工作中提出的新概念是对以前版本的改进。通过功能性元件布置的改进,轮椅在楼梯上运动时的稳定性和均匀性得到了提高。尤其要注意的是,在爬楼梯操作过程中,要确保使用者的舒适性。为此,我们引入并设计了一种凸轮机构,以补偿运动单元旋转在轮椅框架上产生的振动。提出了一种凸轮廓线的设计方法。此外,还对凸轮轮廓和机构尺寸进行了参数分析,目旨在找到在压力角和曲率半径方面具有合适尺寸和性能的凸轮轮廓。
1.导言
如今,对于残疾人或行动不便的人来说,建筑设计的不够人性化是一个尚未解决的问题。根据[1]的数据,英国约有120万轮椅使用者,约占英国人口的2%;就美国人口而言,约330万人(1.4%)使用轮椅或类似设备,1020万人(4.4%)使用手杖、拐杖或助行器[2]。只有28%的轮椅使用者年龄在60岁以下。残疾与年龄密切相关:16-19岁人群中有2.1%的人残疾;50-59岁中的31%;78%的85岁或85岁以上人群[1]。这意味着随着社会老龄化,轮椅使用者的数量将增加,因此建筑方面的问题将变得更加重要。此外,残疾人进入建筑物面临的最常见障碍往往与其自身有关[3]。从这些数据可以明显看出,保障残疾人可以一定程度上自主行动是一个尚未解决的挑战。
与建筑相关的问题可以通过两种方式解决。一方面,政府可以尝试引入标准,以消除建筑物设计方面的缺陷。另一方面,当由于技术或经济原因无法拆除建筑障碍物时,可以为残疾人提供能够攀爬障碍物的装置。
一些商用爬楼梯设备已经存在,但大多数设备复杂、笨重、沉重、昂贵或需要大量传感器和执行器。因此,在研究领域中,提出了几种结构,旨在提高现有爬楼梯轮椅的效率、简单性和爬楼梯效率。轮椅爬楼梯机构可根据[4]进行分类,其分类方式与爬障碍移动机器人相同:轮子、机械腿、轨道及其混合组合。
[5]中提出了一种纯双腿轮椅。这种方案对于爬楼梯非常有效,但控制复杂度很高。[6,7]中提出了一种混合轮轨解决方案。通过一个可变形的轨道,轮椅可适应平地或爬楼梯运动。轨道保证了爬楼梯时的稳定性和规律性,但效率较低。通过增加用于平地运动的摩托轮移动系统,轮椅效率提高,但结构的复杂性也增加,特别是由于需要双机驱动。
研究工作中最常见的结构之一是使用机械腿和车轮组合运动的轮椅。该解决方案将平坦地面上车轮的高效性与楼梯上机械腿运动的高效性结合在一起,如[8–10]所示。另外两种有趣的解决方案是[11,12],它提供了一个能够通过铰接框架爬障碍物的轮椅方案。机械腿和车轮组合运动轮椅中最有趣的解决方案之一是在[13–17]中提出的。在这些论文中提出的模型使得每个车轮能通过铰接机构爬上台阶。但即使解决方案有效,也需要有大量电机和复杂的电气控制。
最后,另一种类型的运动系统是车轮组。在[18,19]中,提出了一种两轮群集机构。该结构不是静态稳定的,但应通过基于倒立摆模型的稳定控制器进行平衡。维持动态稳定性和安全问题所需的高控制要求是这种解决方案的主要缺点。[20,21]中提出了一种两轮群集解决方案。在这些情况下,通过引入附加铰接机构来保证静态稳定性。最后,[22]提出了一个具有混合轮轨体系结构的三轮群集解决方案。车轮组是移动装置,确保了攀爬能力,同时轨道使轮椅具有了相当的静态稳定性。
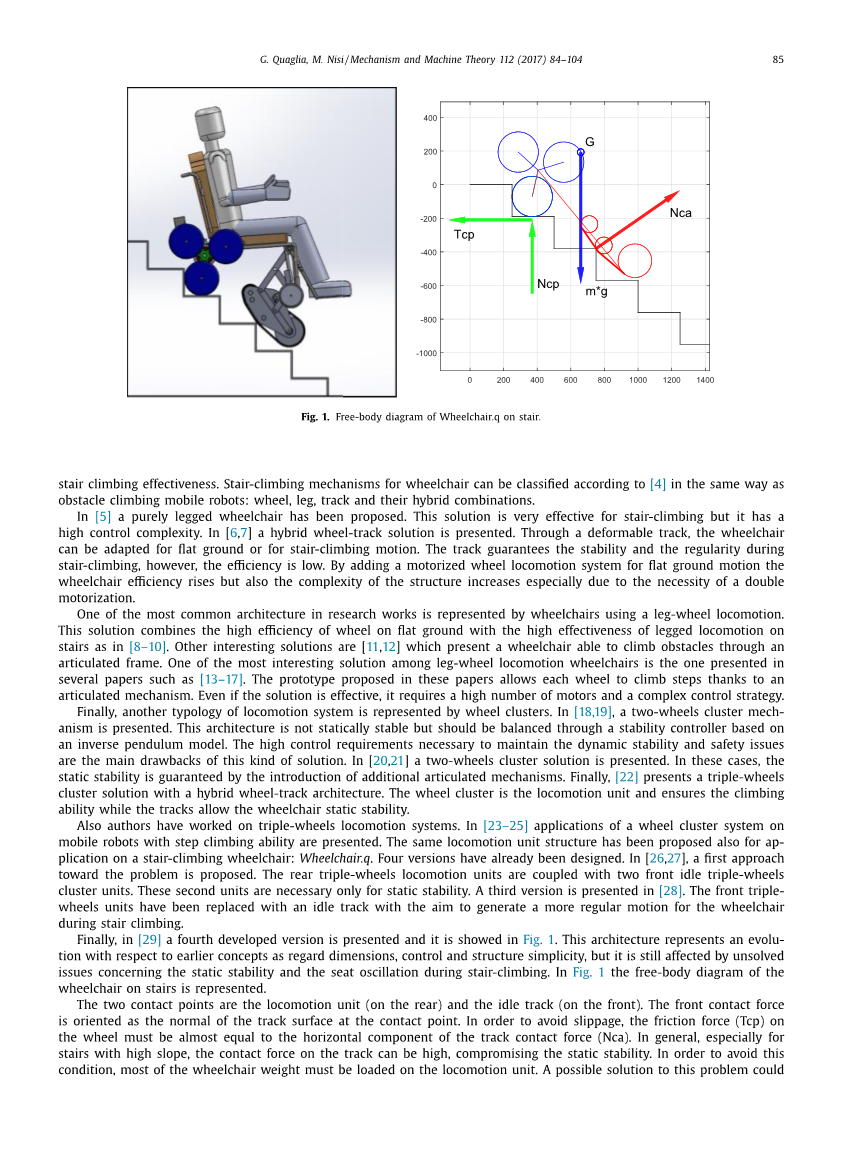
作者还研究了三轮运动系统。在[23–25]中介绍了车轮组系统在具有爬坡能力的移动机器人上的应用。同样的运动单元结构也被用在了“q型轮椅”上,并且我们已经设计了四个版本。在[26,27]中,提出了解决该问题的第一种方法。后三轮移动装置与前面两个三轮组装置耦合。第二个装置仅仅是出于静态稳定性的考量。第三个版本见[28]。前三轮装置已被轨道取代,目的是在爬楼梯时为轮椅生提供更稳定的运动。最后,在[29]中给出了第四个开发版本,如图1所示。该体系结构代表了相对于早期概念(如尺寸、控制和结构简单性)的演变,但它仍然受到楼梯攀爬过程中有关静态稳定性和座椅摆动的问题的影响。图1显示了楼梯上轮椅的受力图。
图1,“轮椅q”在楼梯上的受力图
两个接触点是移动装置(在后部)和轨道(在前部)。前接触力定位为接触点处履带表面的法线。为了避免打滑,车轮上的摩擦力(Tcp)必须约等于轨道接触力(Nca)的水平分量。通常,特别是对于高坡度的楼梯,轨道上的接触力可能很高,从而影响静态稳定性。为了避免这种情况,大部分轮椅重量必须装载在移动装置上。这个问题的一个可能的解决方案是一个倒置的结构,运动单元在前面,承载大部分轮椅重量,轨道在后面。
第二个问题与爬楼梯时轮椅摆动有关。使用行星轮系运动是轮椅摆动的来源。在稳态阶梯爬升过程中,运动单元中心以类似于摆线的非直线轨迹前进,如图2所示。
轮椅上不需要控制座椅方向的主动机构,因此摆动运动会传递给使用者,从而降低舒适度。在早期的轮椅概念中,通过适当选择运动单元和轨道之间的相对位置,试图最小化振动振幅,这是一个难题[28]。然而振动不能完全消除,只能使其最小化,而这一点是设计轮椅时的一大约束。通过在轮椅框架和座椅之间引入凸轮机构,可完全补偿与运动装置运动相关的振动。理论上,可实现座椅振动的完全补偿。基于这些原因,我们设计了一种新的轮椅结构。
图2,轮椅稳态爬梯时运动单元中心的轨迹
论文组织如下:第2节介绍了新的轮椅结构。简要描述了功能元件,并介绍了凸轮机构。第3节介绍了凸轮机构的设计过程。说明了从运动单元运动描述开始获得正确凸轮轮廓的方法。
第4节对凸轮机构进行了参数分析。分析了机构参数对凸轮廓线性能的影响,提出了确定机构最佳尺寸的方法。最后,在第5节中陈述了结论,并考虑了项目的未来发展。
2.功能设计
本节介绍了新的轮椅结构。
2.1. 功能要素
目前开发的所有轮椅结构都是由三个功能部件加上传动组构成的。
此外,根据导言中的考虑,本文提出的新概念思路与其相同,也就是使它们以不同的方式排列。图3给出了新旧轮椅版本之间的比较。轮椅功能元件包括:移动装置(图3中的元件1)、座椅(2)、轨道(3)和传动组(4)。
[23–25]中介绍的所有轮椅版本以及所有移动机器人的特点都是三轮移动装置。如图4所示,它由一个三角形框架和一个内部周转传动结构组成。这种结构有两个自由度:中心齿轮的旋转和行星架的旋转。该功能被用于开发了一种智能结构,用于移动机器人自主攀爬障碍物。
[23–25]:仅使用一台电机控制每个运动单元,其行为由动态条件决定。尤其是当机器人碰到障碍物时,行星齿轮架旋转会自动启动,产生的摩擦力能够阻止车轮旋转。对于轮椅应用,使用了相同的移动装置结构,但采用了不同的驱动系统[29]。由于安全问题,必须控制所有自由度,因此我们使用两个不同的电机独立控制车轮旋转和行星齿轮架旋转。所采用的架构如图5所示。两个行星齿轮架都连接到同一个电机(Mp)以实现同步旋转,而两个不同的电机(Ms)用于控制每个移动装置的中心齿轮旋转。
图3,旧(左)和新(右)轮椅版本中的功能元件
图4,1.行星架 2.中心齿轮 3.行星轮(1) 4.行星轮(2)5.转轮
图5,驱动和传动系统
2.2. 轮椅结构
轮椅的运动受先前介绍的功能元件之间的相对位置和连接的影响。实际上,从相同的功能要素开始,并结合在导言结束时所做的考虑,可以设计出几个结构。本文的创新之处在于在轮椅框架和座椅之间引入了凸轮机构,以解决由运动单元运动引起的振动。
图6,轮椅结构:(a)座椅自调平凸轮机构;(b)凸轮机构的等效功能方案;(c)座椅的纯平移运动
图7,轮椅结构关键点的速度向量
图8,轮椅配置——可在平坦地面和楼梯上移动
除了确定具体结构外,还要考虑:
bull;凸轮机构应集成到轮椅结构中,以尽量减少连杆和联轴器的数量。
bull;凸轮从动件应有摆动,以避免滑动。
bull;结构应尽可能简单,运动部件和执行机构数量应较可能少。
在图6中,提出了轮椅结构的架构。凸轮相对于运动装置是固定的。
当移动装置爬梯时,凸轮根据设计轮廓控制点R和P之间的距离,并保持座椅的恒定方向。如果凸轮机构完全补偿了运动单元运动产生的振动,则座椅沿平行于台阶边缘的直线移动。图7展示了轮椅结构关键点的速度矢量。
在图8中,是轮椅分别在平坦地面、楼梯上的状态。在平地运动中,两个脚轮是轮椅的后支撑点。此外,需要一个装置将轮椅变形为适合爬楼梯的形态。应改变轨道和移动装置之间的相对位置,并且必须移动脚轮,以避免接触台阶边缘。对这些方面的详细分析并不是本文的目标,将在以后的工作中讨论。
图9,台阶示意简图
表1,标准台阶尺寸
图10,(a)具有相同阶梯对角线、不同坡度的楼梯(b)具有相同坡度、不同阶梯对角线的楼梯
2.3. 项目要求
在本小节中,轮椅以可攀爬的楼梯的形态表示。该步骤对于确定可能的工作条件以及选择合理的标准条件(通过这些条件生成凸轮轮廓)至关重要。根据UNI10804-gen1999,台阶的比例已标准化,可根据需要选取。式(1)中给出了Blondel公式,该公式将台阶上升高度(h0)与台阶踏面(P)联系起来.
表1列出了三种不同的台阶尺寸。
轮椅驱动系统的尺寸应适用于表1中所有可能的标准楼梯。对于不同的楼梯,移动单元中心的轨迹将不同。这意味着,在任何情况下,都不可能设计出能够完全补偿座椅振动的凸轮轮廓。因此,有必要定义合理的标准楼梯,用于设计凸轮轮廓。当轮椅爬上非标准楼梯时,通过凸轮机构可进行一定的振动补偿,但对于标准的楼梯而言,振动可以忽略不计。
2.4.标准楼梯
在本小节中,将定义标准阶梯尺寸。任何类型的楼梯可完全由两个参数定义:楼梯坡度(alpha;S)和阶梯对角线(e),如图10所示。
图10中楼梯的坡度是不同的,楼梯坡度以alpha;S、alpha;Srsquo;表示。理想状态下,假设连接台阶边缘的线是水平的。
点P(运动单元的中心)的轨迹通常很复杂,如图2所示,它取决于运动单元尺寸和步长比例之间的关系。能简化凸轮设计过程(即标准楼梯)的阶梯的几何体是可以为点P生成最简单轨迹的几何体。当移动装置仅围绕移动装置的车轮连续旋转时,这个条件才成立。这意味着行星齿轮架旋转120°后,前轮与下一格台阶接触。在这种情况下,运动装置中心的轨迹是一系列圆弧,如图11所示,独立于楼梯坡度。当e等于方程式(2)中所述的移动装置的两个车轮之间的距离时,才会出现这种情况。
图11,不同坡度的标准楼梯上的运动单元轨迹
图12,用于获得移动单位臂长(lL)值的方案
表2,标准楼梯尺寸
通过图12的方案,通过考虑最高台阶在上车轮接触处具有安全裕度的结构,获得了移动装置臂(lL)的长度。通过在图12的方案的几何关系,可以导出公式(3)。通过施加等于240 mm[28]的最大爬梯高度(h0max),可获得公式(4)中的lL值。h0max的值很大,但它是有可能发生在单级爬坡中的,例如人行道。
将式(2)中e(eN)的标称值与表1中的值进行比较,可以发现标称值小于标准楼梯的任何值。
从一方面来说,这意味着无法获得标准楼梯的标准条件,因此,不能通过凸轮机构完全补偿座椅位置。另一方面,它能确保在移动装置旋转后,前轮在稳定状态下靠在踏面上。这对安全性非常重要
计算标称eN值后,有必要确定标准楼梯坡度(alpha;SN),以完全定义标称楼梯。例如,可以选择标准楼梯坡度的最大值(alpha;S=37°),因此,可以从图9的方案中得出标准上升值(h0N)和标称踏面值(pN),并且可以写出等式(5)。
标称楼梯现已完全定义,其尺寸汇总在表2中。
当轮椅爬上非标称尺寸的台阶时,其运动不再是围绕移动装置阻塞轮的纯旋转。参考图13(图13中标记为1)。这是其中一个移动装置臂垂直于连接台阶边缘的线的情况。根据该参考配置,阶梯爬升序列可分为三个阶段:
图13,非标准楼梯上运动单元的运动
图14,爬梯过程中机构的示意图
1.从1到2,移动装置绕着Q1进行有限旋转,使前轮与阶梯接触。初始和最终的运动轨迹已得到,但准确的轨迹是无从得知的,因为它取决于管理运动单元两个自由度所采用的控制逻辑。
2.从2到3,运动绕着Q2进行有限旋转。旋转幅度随楼梯尺寸的变化而变化。
3.从3到1,移动装置绕着Q3进行有限旋转,直至图示情况。与第一阶段一样,初始和最终运动轨迹是已知的,但精确的轨迹取决于控制方案。
在攀爬非标准楼梯时,移动装置中心(点P)的可能轨迹在图13底部表示为上述三个阶段的组合。
3.凸轮机构设计
接下来,我们将介绍凸轮机构的设计。如前一段所述,将针对标称准楼梯制定设计流程,且所提及的方法仅在该假设前提下有效。
从图6所示的机械结构开始,可以得到图14。与沿楼梯移动的轨迹相连的点S沿着与连接台阶边的直线所平行的直线轨迹移动。凸轮轮廓的设计必须确保点P和R之间的距离有适当变化,以保持座椅的恒定方向(即元件RC的恒定方向)。根据
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[590451],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

