英语原文共 12 页,剩余内容已隐藏,支付完成后下载完整资料
用定排量泵控制剪刀提升液压系统速度的一种新方法
卢卡斯-斯塔温斯基
摘 要
本文介绍了一种利用变频器和简单控制器单元控制固定排量泵静液系统的新方法,目的是提出一种控制剪刀升力驱动速度的方法,使平台在负载、几何形状和电流位置上保持恒定速度。该方案的主要特点是在从平台位移传感器到电机速度控制系统的准开环中采用反馈,以保证在典型的静压剪刀升力器中使用该控制系统的可能性,只在现有的机器上增加一个逆变器、一个平台位移传感器控制器。本文所提出的控制策略已在现有的驱动上进行了验证,结果表明,该控制策略具有良好的控制策略,对平台速度的保持和成形具有很高的精度。整个传动系统的数学模型和物理模型已在试验台上得到验证。所进行的研究提供了提高效率、降低加速度、减速、阻尼和提高运行安全性等新的可能性。
关键词:电液传动装置;速度控制;剪刀升降机;可变传动;变速泵
1. 介绍
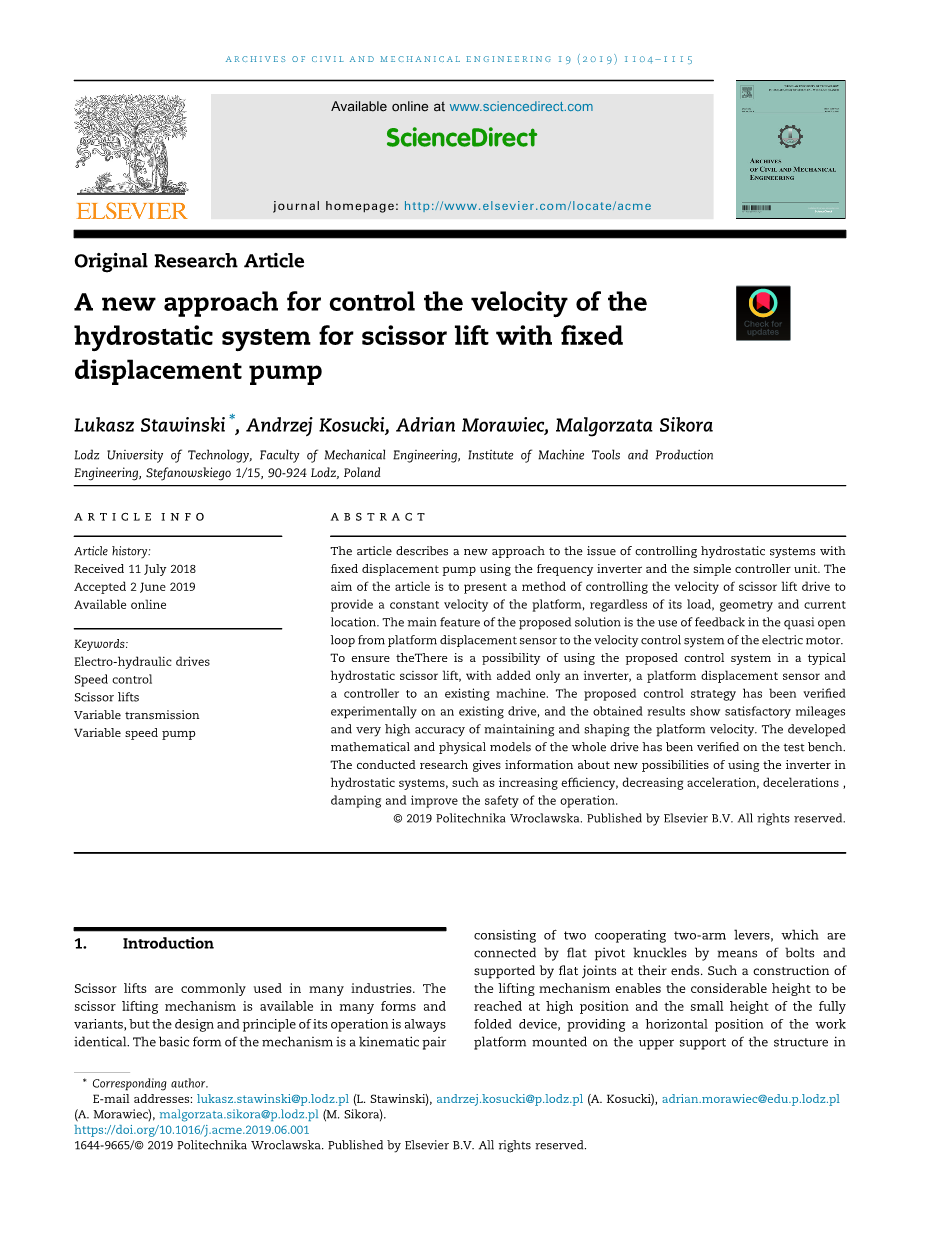
剪刀式升降机在许多行业都有广泛的应用。的剪式升降机构有多种形式和用途变型,但其设计和运行原理始终如一相同的。该机构的基本形式是运动副由两个合作的双臂杠杆组成,它们是用螺栓和扁平枢轴节连接由两端的扁平接头支撑的。这样一种构造提升机构使相当的高度达到了在高位置和高度的充分折叠装置,提供工作的水平位置平台安装在结构的上部支撑上每一个位置。情结的后果升降系统的几何形状是可变的最终传动比,这导致了平台在驱动元件(如气缸)的匀速的平台的总高度Xp由总高度决定活塞杆位移与压力的关系工作平台表示变比。比例为:
Vp和Vs是平台和驱动器速度,因为Xp和Xs是平台和执行器的位移。因此生产这类设备的厂家通常采用报告平均起重时间。可变比率也会引起a气缸上的可变负载,由重量引起结构和提升载荷。驱动构件的载荷随着平台高度的变化,效率也随之变化电动机和静液压系统的变化。由于这些事实表明,升降时平台的速度是可变的。
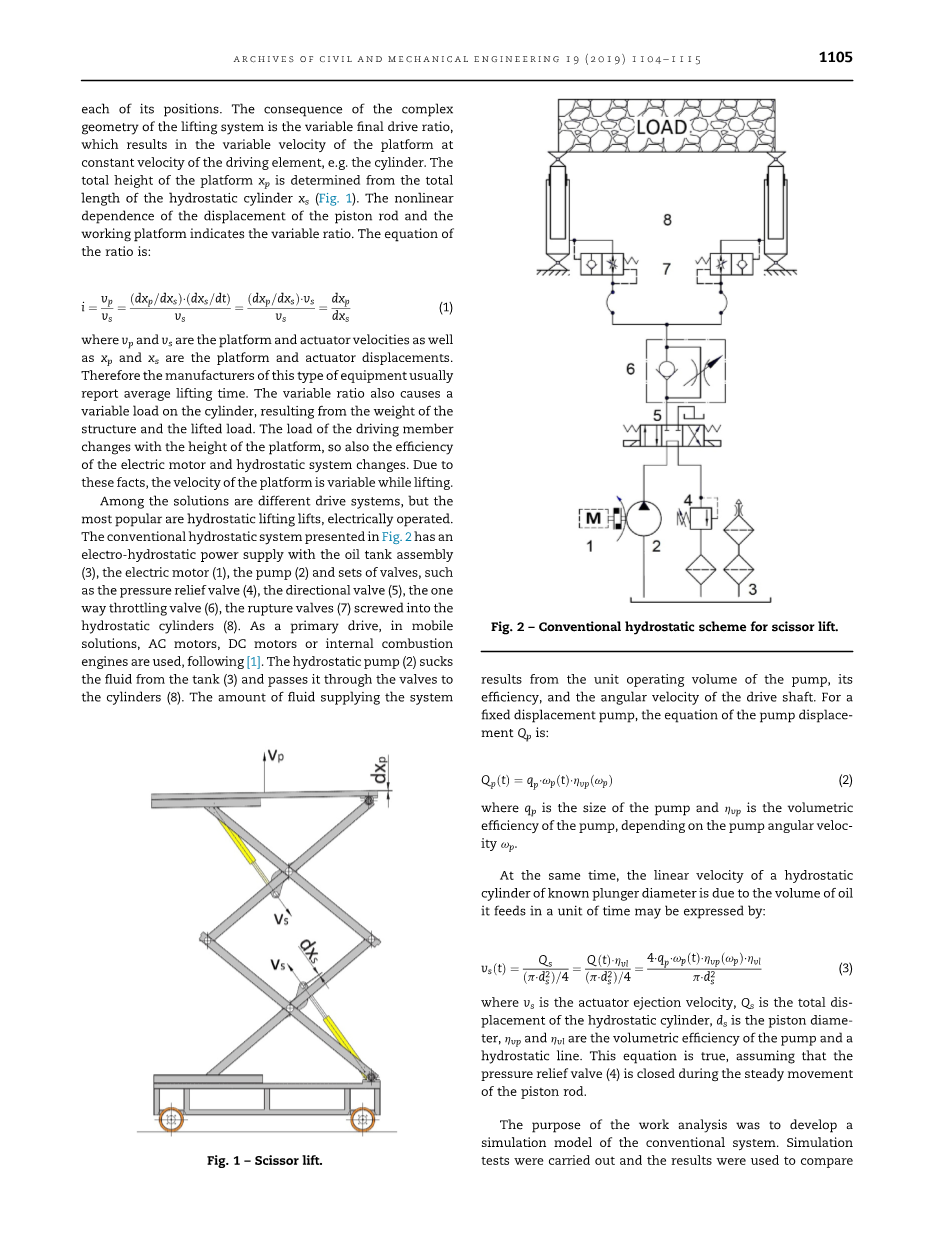
解决方案中有不同的驱动系统,但是最流行的是液压升降电梯,电动。图中所示的传统流体静力系统有一个静液电源与油箱总成(3)、电动机(1)、泵(2)及成套阀门等如减压阀(4)、换向阀(5)、各向节流阀(6)、破裂阀(7)拧入静液压缸(8)。作为主要驱动,在移动设备中解决方案,交流电机,直流电机或内燃在[1]之后使用引擎。静压泵(2)吸吮将流体从水箱(3)中通过阀门输送到气缸(8)。供给系统的液量结果由单位泵的操作容积决定效率,和传动轴的角速度。
对于定排量泵,泵排量方程为:
qp是泵的尺寸,ղvp是体积泵的效率,取决于泵的角速度omega;p。同时,线速度呈静力油缸的柱塞直径是由油的体积所决定的它输入的时间单位可以用以下方式表示:
其中vs为执行器的弹射速度,Qs为总静液缸的放置位置,ds为活塞直径,ղvp和ղvl为泵的容积效率,。假设减压阀(4)在平稳运行期间关闭活塞杆,这个方程成立。
对工作的分析是开发一个常规系统仿真模型。模拟进行了试验,并对试验结果进行了比较与新提出的系统的结果显示在本文的进一步研究。
2. 控制速度的方法静水接收机
最简单,最便宜,最常见的控制方法静水系统中静水接收器的速度用定排量泵就是要用节流阀或流量调节器。这种方法有很多缺点,如控制困难,易受负载影响和能量损失。电子学的发展提供了新的可能性用于控制固定和可变的流体静力系统排量泵与电磁阀,比例技术或特殊控制器,配合电动汽车。
近年来,驱动采用频率驱动的电机逆变器(FI)已成为自动化系统的主导。带有矢量控制的新一代,称为磁场介绍了九十年代中期引入的定向控制(FOC)驱动非常理想的运动特性,如充分速度范围内的扭矩(对于带速度传感器的FOC),允许高扭矩,大速度范围和高稳定性载荷变化时的角速度。
预期的结果是执行由新一代驱动的驱动器进入流体静力传动系统。有例如,在市场上呈现这种解决方案的趋势和伊顿,所在的公司用作压力调节器,进行了研究了各种型号电机的应用流体静力系统供给的速度控制,在参考文献中有其他描述。指的是系统具有质量旋转负载的旋转静压马达并确认这种驱动的适用性。Velocity-variable开关差动泵的介绍见参考文献。这设计采用少量固定排量泵和目标由于降低温度而产生的适当的动态特性的损失。调速泵控电静液器ic系统也采用了结构神经网络来实现在参考文献中预测钢瓶腔内的压力。本文考虑了分析与控制采用了一种新颖的直接静液压缸驱动策略固定排量泵认为是过度驱动的意义它的输入比合理的输出多。这两篇论文介绍了由伺服马达和液压马达组成的液压系统汽车司机。
然而,没有出版物描述使用以形成一个函数来控制泵的排量改变它的速度。工作机器,驱动器和控制小组由机床研究所和罗兹理工大学生产工程专业参与了FI对流体静力学影响的研究考虑流体静力学的系统动力学系统具有可变负载的气缸。
本研究的主要目的是提出一种新的控制方法液压系统采用固定排量泵采用电机馈电和FI矢量控制,操作简单控制器。本控制系统的主要目标是提供剪式升降平台的速度恒定,不受影响整个驱动的负载和效率。
3.解决方案的概念
新控制系统的主要特点是简单以及在常规流体静力学中使用它的可能性系统,配有定排量泵和电动异步电机和典型的流体静压阀。新系统的附加元素是:-位移传感器安装在小车和平台;-带矢量控制(FOC)的变频器;-准开环控制器(QOLC)
关于剪刀升降机的实际位置的信息平台(Xp)是指向QOLC和感谢几何数据(可变比i)的剪刀升降机放入QOLC,控制器向FI发送参考信号Uref。此外,带矢量选项的FI是抗负载的,因此它可以发送电机信号稳定。电流的速度电机泵轴产生适当的泵排量,提供平台恒定的速度。在为了实现这一目标,需要完成以下任务:
- 创建剪刀升降驱动器模型;
- 对真正的剪刀升降驱动器进行测试;
- 验证模型;
- 定义控制器的设计原则,并指定它们的信号范围。
4. 数学模型
为了对抓斗进行平台速度分析,必须首先建立起升机构的仿真模型。一般模型由以下几个部分模型组成:
- 流体静力学系统模型;
- 旋转质量的力学模型;
- 变频器型号;
- 控制系统模型;
- 剪刀式升降机的几何模型设计
在此基础上建立了剪式升降的流体静力学模型驱动元件的运动方程和流动方程流体静压管路的平衡。第一行包括泵配有溢流阀和换向控制阀。
这部分是描述的由流量平衡方程得到如下形式:
Qa是总漏量,Qc1是电容泵侧静压管路,Qz是流量通过压力通过换向阀,QR表示流量通过换向阀到达静压缸,QR1表示流量通过换向阀到达储罐。
第二根静压管线包括一个方向控制装置带静液压缸的阀门有如下说明:
Qc2是静液压缸侧的电容静压线和ղs是静压缸的效率。
静液压缸的运动方程为:
其中mQ是由结构和载荷导出的活塞轴的质量,fs是静水缸的粘度系数,PS是液体静压缸内的压力,g是重力的加速度。
压力安全阀由惯性元件的方程描述,其形式如下:
其中Tz是阀门的时间常数,hz是阀门的增益因子,Pz是阀门的开启压力。在静压缸稳态运动过程中,阀的裂纹压力高于电力线中的压力,Qz =0。
电动机与泵之间的轴作为转动质量的机械模型已被简化为具有转动惯量的一个单元:
当Ie是有效转动惯量时,Ir、IC和Ip是转子、联轴器和泵的惯量。这个元素的运动方程是:
其中omega;m=omega;p是电机和泵轴的角速度,Tm是电机定子的转矩,TP是泵轴上的扭矩。当电机工作在它的机械特性时,它的扭矩由方程式给出:
其中omega;s=omega;n是电机的同步角速度和名义角速度,Tc是电机的临界扭矩。
在这个系统中的强迫是由假设的速度和限制产生的电压,例如,允许加速度。模型的操作描述为非线性方程:
其中IF是定子电流供电电压,IFpom是定子辅助电源电流,TF1和TF2是构件的时间常数,kIF是元件(2)和(3)的转换因子,Kwzm是增益因子(取决于变频器的类型),TIFpom是成员的时间常数,komega;是构件(5)的角速度系数,kMS是构件的增益因子(4),TMS是构件(4)的时间常数。此外,在系统中建立了一个集成设置器(1),这限制了Ust信号的动态值增加的速率。
控制器QOLP是根据剪刀升力的几何数据建立的模型。输出信号Ust作为下列方程生成:
其中omega;max是电机的最大角速度,Imin是最小比值,比率I是位移的函数从静水模型出发,将执行器的实际位置输入到计算回路中的输入函数选择器中,从试验台上提取剪刀升力的几何形状,建立剪刀升力的三维移动模型,对所研究结构的几何关系和运动仿真进行了精确的分析。显示了机构的五次传动比与平台位移的函数关系。在图的基础上,建立了一个趋势线和一个Lurve方程,并将其输入到控制器QOLC中。
5. 起重系统的计算机模型和模拟测试
该仿真模型由控制器、变频器、电机和静压系统组成(图9),其特点是结构简单,与实测值具有很高的兼容性。用Microsoft Visual Basic软件对模型进行数值求解,并对模型进行了描述使用状态空间方法。模型的完整描述如下:
模型的输入函数是电压与假定的泵速度成正比。这个信号使用图所示的QOLC控制器函数进行计算。方程的初值取决于圆柱体的初始位置和平台的载荷。该模型用作者在Microsoft Visual Basic软件中开发的计算机程序,采用微分方程数值求解的方法进行了求解。
对于两种驱动方式,在将平台提升到极大值高度Xp=2m和额定载荷mQ=100 kg的情况下,进行了模拟试验:
- 经典驱动,其角速度取决于其机械特性;
- 建议采用可调电动速度的驱动系统,以提供恒定的平台速度。
图中给出了所有系统部件的速度变化,即静压执行器的速度us、平台上的速度和电机在平台位移XP函数中的角速度。在传统的剪刀升力静压系统中,平台速度随平台升力而减小,平台速度取决于泵的油量,它取决于泵的漏油量(在负载下增加)和电机的角速度(在负荷下减小)。提升系统的几何形状。结果表明,在传统的静压传动中,固定排量泵和电机、高平台加速度和平台振动的平台速度都是可变的。新的控制系统塑造了静压泵的流量,从而使执行器的速度保持恒定的平台速度,而不考虑其位置。此外,还可以减少平台的加速度和振动。
6. 实验调查与结果
实验测试是在一个特别现代化的设备上进行的剪式升降,即除常规控制外
该方法采用了提出的速度单元控制系统(图12)。试验台提供了分析了传统的和一种新的驱动系统。一组传感器提供了记录操作的可能性不同条件下的系统参数的技术试验台主要元件参数见表。
利用LabView软件对QOLC进行了设计PC机,连接接口NI usb6221。系统有一个
自动模式下,哪里有适当的强制功能和电机运动方向是给定的或手动模式。
输入函数可以是电机的速度或平台,被适当地转换成电压科大的信号。该界面有记录和选项实时显示有趣的操作参数,得益于此,可以在线观察系统的行为。QOLC使用来自平台位移传感器xp (C),进入数据采集站。然后根据算法编写在LabView环境中相应的电压信号Ust,正比于假设速度电机带动泵,将其送至变频器供电该电机。角速度驱动轴的ns是由电机连续控制的采用变频调速系统。额外的压力传感器pp在执行器侧ps (B)和静液压缸上的流量计Qs (A)允许检查系统正常运行。试验台通讯系统由传动控制系统组成开启信号也用于在正确位置开启换向阀
7. 实验测试
实验的目的是验证所提出的控制结构适用于不同的测试用例,包括驱动的操作范围。因此,当提升平台的位移相同时,在离散间隔Loadext=[0,50,100]%的情况下,用外部负载评估性能。电压基准函数以两种方式执行:
-
Ust = 10 V,等于1500转(157 rad/s)的电力电机的转速与传统的静液转速相同开
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[604347],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

