英语原文共 15 页,剩余内容已隐藏,支付完成后下载完整资料
多智能体系统的物理安全和网络安全分析:最新进展综述
摘要:多智能体系统(MASs)通常由多个智能实体组成,具有独立的感知、通信、计算和决策能力。如今,MASs在智能电网、智能制造、传感器网络和智能交通系统中有着广泛的应用。对MASs的控制通常是通过代理之间的信息交换来协调的,这是影响协调和协作性能的最重要因素之一。然而,针对单个代理的意外物理故障和网络攻击可能会通过信息交互迅速传播到其他代理,从而导致整个系统性能的严重下降,甚至导致MASs的破坏。本文关注由物理故障和网络攻击引起的MASs的安全/安全分析和综合,我们的目标是对MASs的故障估计、检测、诊断和容错控制以及受两种典型网络攻击影响的MASs的网络攻击检测和安全控制的最新结果进行全面综述。最后,论文总结了MASs安全问题的未来研究方向。
关键词:一致性、欺骗攻击、拒绝服务攻击、故障检测、故障估计、容错控制、多代理系统。
- 引言
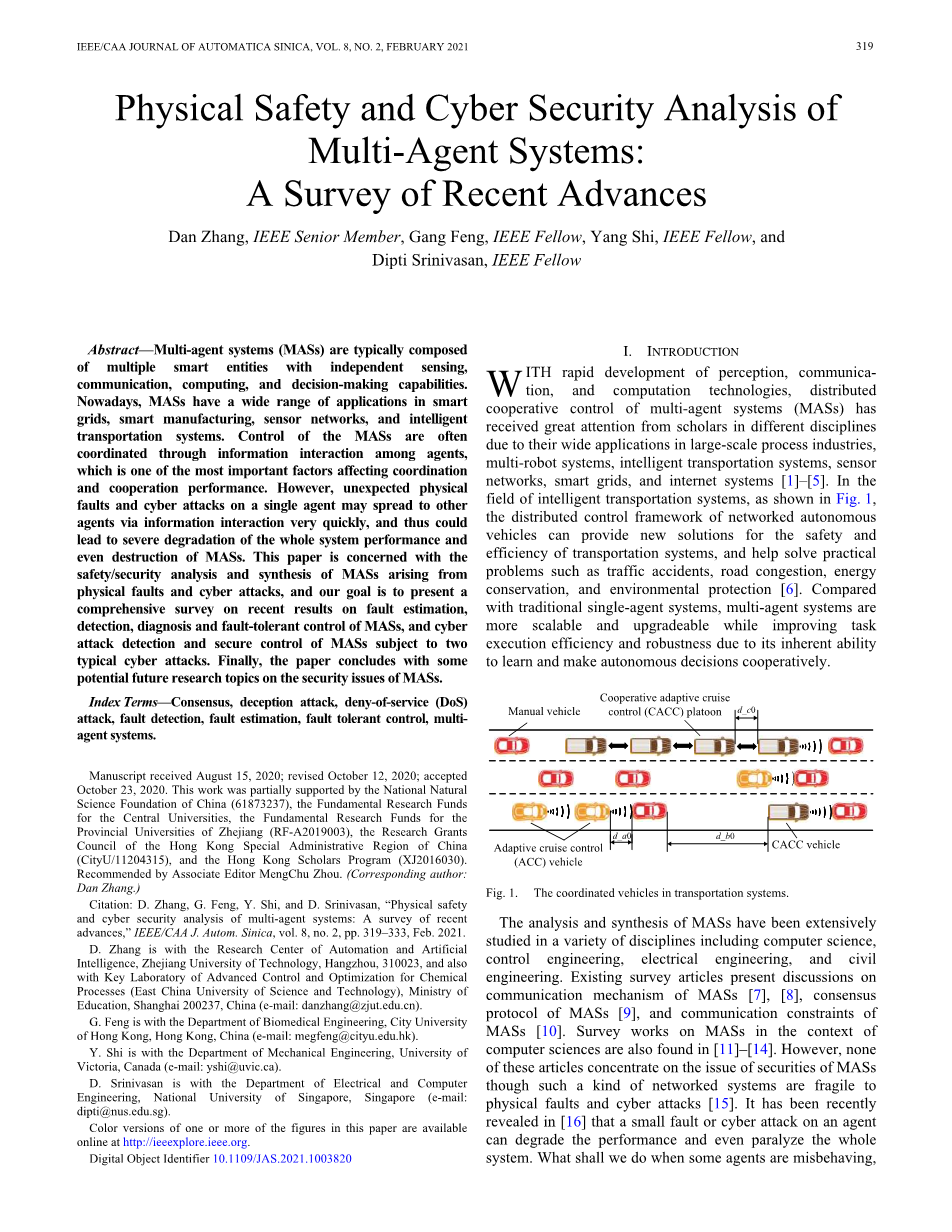
随着感知、通信和计算技术的快速发展,多智能体系统的分布式协同控制因其在大规模过程工业、多机器人系统、智能交通系统、传感器网络、智能电网和互联网系统中的广泛应用而受到不同学科学者的极大关注。在智能交通系统领域,如图1所示,网络化自主车辆的分布式控制框架可以为交通系统的安全和效率提供新的解决方案,并有助于解决交通事故、道路拥堵、节能和环保等实际问题。与传统的单智能体系统相比,多智能体系统由于其固有的学习和协作自主决策的能力,在提高任务执行效率和鲁棒性的同时,具有更强的可扩展性和可升级性。
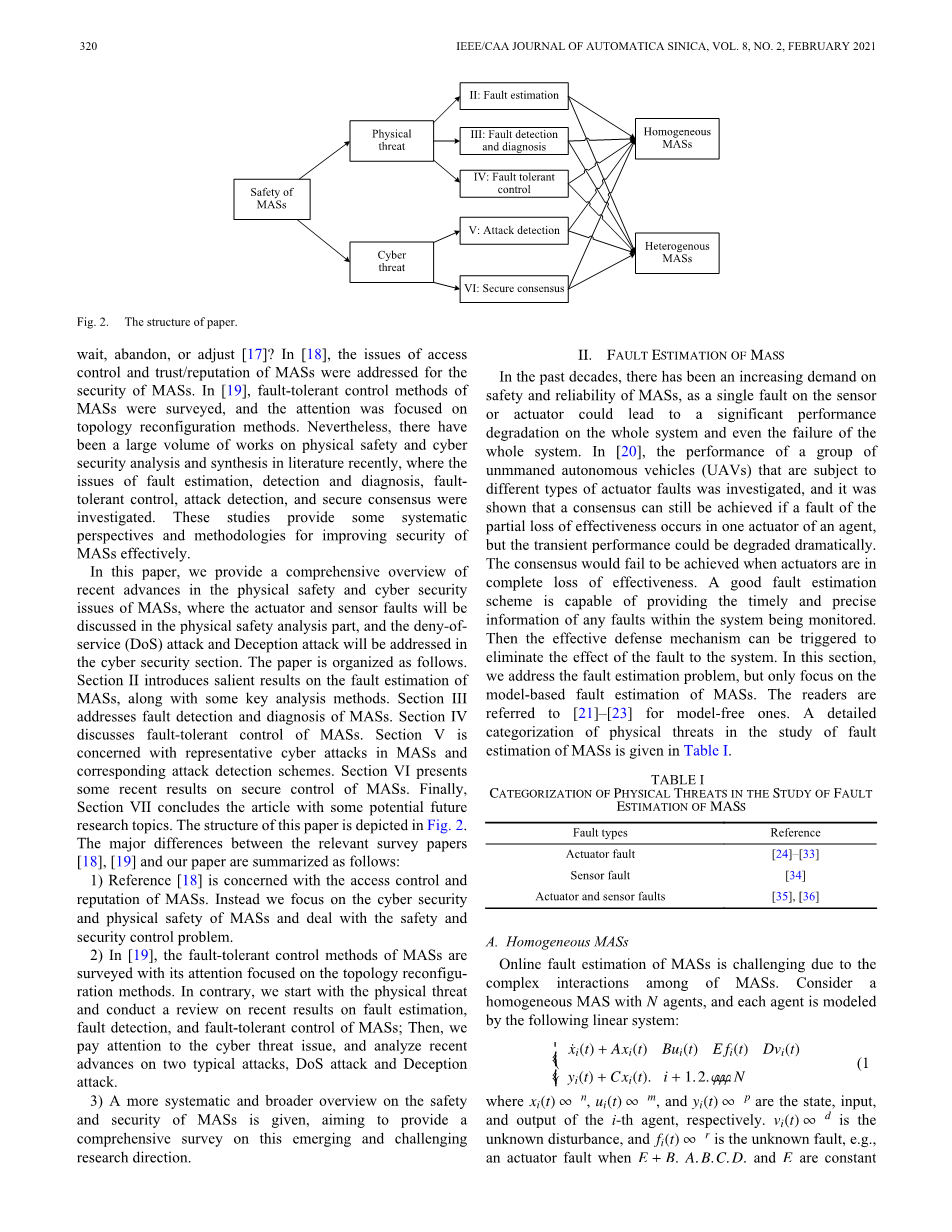
MASs的分析和综合在包括计算机科学、控制工程、电气工程和土木工程在内的各种学科中得到了广泛的研究。现有调查文章对MASs的通信机制,MASs的共识协议和MASs的通信约束进行了讨论。在计算机科学的背景下,关于MASs的调查工作也可以在中找到。然而,这些文章没有一篇集中在MASs的安全问题上,尽管这种网络系统对物理故障和网络攻击是脆弱的。最近在中发现,对代理的小故障或网络攻击会降低性能,甚至使整个系统瘫痪。当一些特工行为不端时,等待、放弃还是调整?为了MASs的安全,讨论了MASs的访问控制和信任/声誉问题并综述了MASs的容错控制方法,并将注意力集中在拓扑重构方法上。然而,最近在文献中有大量关于物理安全和网络安全分析和综合的工作,其中研究了故障估计、检测和诊断、容错控制、攻击检测和安全一致性的问题。这些研究为有效提高MASs的安全性提供了一些系统的视角和方法。在本文中,我们全面概述了MASs物理安全和网络安全问题的最新进展,其中执行器和传感器故障将在物理安全分析部分讨论,拒绝服务(DoS)攻击和欺骗攻击将在网络安全部分讨论。论文组织如下。第二节介绍了MASs故障估计的显著结果,以及一些关键的分析方法。第三节讨论MASs的故障检测和诊断。第四节讨论MASs的容错控制。第五部分是关于MASs中典型的网络攻击和相应的攻击检测方案。第六节介绍了MASs安全控制的一些最新结果。最后,第七节总结了文章的一些潜在的未来研究课题。本文的结构如图2所示。相关调查论文[18]、[19]和我们的论文之间的主要差异总结如下:1)参考文献[18]关注的是MASs的访问控制和声誉。相反,我们关注MASs的网络安全和物理安全,并处理安全和安全控制问题。2)在[19]中,综述了多智能体系统的容错控制方法,重点介绍了拓扑重构方法。相反,我们从物理威胁入手,回顾了MASs的故障估计、故障检测和容错控制的最新成果;然后,我们关注了网络威胁问题,分析了两种典型攻击——拒绝服务攻击和欺骗攻击的最新进展。3)对MASs的安全和安保进行了更系统和更广泛的概述,旨在对这一新兴和具有挑战性的研究方向进行全面综述。
- 质量的故障估计
质量的故障估计在过去的几十年中,对质量的安全性和可靠性的要求越来越高,因为传感器或致动器上的单个故障可能导致整个系统的性能显著下降,甚至整个系统的故障。在[20]中,研究了一组受不同类型执行器故障影响的无人驾驶自动驾驶车辆的性能,结果表明,如果一个执行器发生部分失效的故障,仍然可以达成共识,但瞬态性能可能会急剧下降。当致动器完全失效时,共识将无法达成。一个好的故障估计方案能够提供被监控系统中任何故障的及时和精确的信息。然后可以触发有效的防御机制来消除故障对系统的影响。在这一节中,我们讨论故障估计问题,但只关注基于模型的MASs故障估计。无模型的读者可参考[21]–[23]。MASs故障估计研究中物理威胁的详细分类见表一。
海量数据故障估计研究中物理威胁的分类
故障类型 引文
致动器故障 [24]–[33]
传感器故障 [34]
执行器和传感器故障 [35], [36]
- 同质MASs
由于MASs之间的复杂相互作用,MASs的在线故障估计具有挑战性。考虑具有代理的同构MAS,每个代理由以下线性系统建模:
x˙i(t) = Axi(t) Bui(t) E fi(t) Dvi(t)
yi(t) = Cxi(t), i = 1,2,...,N (1)
其中xi(t)Rn、ui(t) Rm和yi(t) Rp分别是第I个代理的状态、输入和输出。vi(t) isin; Rd为未知扰动,fi(t) isin; Rr为未知故障,例如,。当E = B时,执行器故障。a,B,C,D,E是常数矩阵。在[24]中,引入了以下系统:
x˙i(t) = Axi(t) Bui(t) E fi(t) Dvi(t)
zi(t) = Cxi(t), i = 1,2,...,N
其中xtilde;i(t)= xmacr;i(t) Tixmacr;i(t) 是坐标改变后的新状态,xI(t)=Xi(t)x1,Ti是变换矩阵。对于上述代理系统(2),设计了以下滑模观测器[24]
其中alpha;igt;0,G1和G2被设计成确保在表面S={(e2,e3,... ,eN)|Cei = 0}。结果表明,如果故障的导数已知,故障是可以估计的。然而,这个条件似乎是限制性的。动力系统网络的类似滑模观测器也可以在[25]中找到。为了消除对故障的假设,提出了一些其他方法。在[26]中,为了估计系统故障,包括故障作为辅助状态向量的扩充系统被构造如下:
其中对于上述扩充系统(4),设计了以下分布式故障估计器[26]:
其中 xtilde;i(t) Rn 和 ytilde;i(t) Rp 分别是观测器的状态和输出,eta;i(t) = sum;jisin;Ni aij((ycirc;i minus;yi)minus;(ycirc; j minus;yj)) gitimes;(ycirc;i minus;yi)是相对于其邻居的相对输出变量。h为观测器增益,alpha;和F为可调参数。借助李亚普诺夫稳定性理论,通过将故障导数视为未知扰动,导出了线性矩阵不等式的充分条件,使得估计误差系统渐近稳定,并达到规定的Hinfin;性能水平。基于相似增广系统方法和平均停留时间切换方案,当MASs的拓扑结构缓慢切换时,可以分布式地估计过程故障[27]。同时,在文献[28]中基于类似的方法报道了降阶故障估计观测器。对于时变智能体网络的传感器故障估计,在[34]中还推导出了一个增强系统,然后设计了一个未知输入观测器来解决传感器故障估计问题。
在[[35]中,未知输入观测器(UIO)被设计用于分别具有执行器故障和传感器故障的线性质量。针对致动器故障估计,设计的UIO描述如下:
其中eta;I(T)=sum;jisin;Ni AIJ[(yj I(T)yi(T))(yj(T)yj(T))] gi[(yj I(T)yi(T))(y0(T)y0(T))]是来自自身和T的输出估计它的邻居是待解两个矩阵不等式确定的UIO增益矩阵。最近,在[29]和[30]中,在有限频率域中也考虑了一类李普希茨非线性质量的故障估计问题,并且故障估计器的增益由广义卡尔曼-雅库博维奇-波波夫(KYP)引理确定。尽管在上述研究中可以精确地估计故障,但主要问题是必须首先建立一个包括故障作为新状态的增强模型,这可能导致一些计算问题,特别是在基于LMI的设计方法中。主要目标是估计故障,因此可能只需要设计一个降阶估计器,而不需要估计整个状态。通过这样做,可以减少计算负担。
与上述状态增强方法不同,在[31]中引入了中间变量tau;I(t)= fi(t)S Xi(t),其中S是设计参数。从这个中间变量可以看出,它直接包含了故障的信息。因此,设计了一个估计量用于xi(t)和tau;i(t)的估计,使得f u I(t)=pi;I(t) S u I(t)。主要限制是状态观测器和中间变量观测器都是基于估计状态的交互作用而设计的,这可能需要比上述基于输出的结果更多的通信。其他工作,如自适应分布式模糊故障估计也可以在[36]中找到,其中采用模糊逻辑方法来近似代理中的执行器和传感器故障。
值得指出的是,在上述结果中,第I代理中的局部故障不能由它的邻居来估计,因为只有局部状态和故障被扩大用于估计。最近,文献[32]研究了一类李普希茨非线性MASs的分布式故障估计器设计,其中构造了一个新的包含局部状态故障和邻近状态故障的增广状态向量。其中设计的观测器能够很好地估计本地代理及其邻居的故障。当使用增强技术时,共同的限制仍然是计算负担。
B.异种MASs
值得指出的是,上述所有研究[24]–[ 32],[34]–[ 36]都集中在齐次MASs上。实际上,大多数多智能体系统具有不同的智能体动力学,如运输系统中的卡车、公共汽车和轿车。因此,异构MASs的分布式故障估计越来越受到重视。对于一类线性离散时间非均匀线性MASs,在[33]中引入了一种基于分布l1范数的优化方法来同时估计状态和故障。研究表明,当且仅当故障代理的数量小于代理数量的一半时,存在以下优化问题:
s.t.y(k) = Cx(k) (7)有解,则故障f(k)可以估计。进一步表明,如果在时间k的状态估计是有界的,并且在时间k 1的故障估计误差也将是
有界的,即。当误差有界为f and;( xk(k )1)x(KF)(sum;k1 le;1)alpha;(max i1,j)时,故障估计2(M -N)/(M-2N)times;xi;alpha;max,其中M和N分别为代理数和故障代理数。 A,n是断层的维数。由于上述优化问题是以集中方式解决的,这导致了大的计算成本,尤其是当系统规模大时。为了减少计算负担,引入了受分布式基础追踪(DBP)算法[37]启发的分布式框架:
其中lambda;ˇI是x(k)的估计,kappa;lambda;ˇ(k)=rho;isin;lambda;ˇ(k)lambda;ˇij(k))。故障估计可由I(I)fˇ(k 1)=lambda;ˇ(k 1)Alambda;ˇ(k)Bkappa;lambda;ˇ(k)确定。然而,所提出的分布式算法只有在领导者能够在初始时刻同时收集局部测量和相对测量,并且在初始时刻没有故障时才起作用。此外,全局系统状态矩阵A和B仍然需要为所有代理所知。针对异构MASs的全分布式故障估计器的设计仍然是一项具有挑战性的任务,值得进一步研究。
三.故障检测和诊断
与故障估计相比,传统的故障检测和诊断要求较低,因为它仅寻求在系统中检测到故障时触发报警信号(然后隔离故障)。它已被广泛应用于许多实际系统,如电力系统[38]、机电系统[39]、化学系统[40]等。我们现在讨论MASs的故障检测和诊断问题,并介绍这方面的一些最新结果。MASs故障检测和诊断研究中物理威胁的详细分类在中给出表二。
断层研究中物理威胁的分类
肿块的检测和诊断
故障类型 引文
致动器故障 [41]minus;[44]
传感器故障 [45]
执行器和传感器故障 [46]minus;[51]
文献[41]研究了二阶线性MASs网络的分布式故障检测,其中设计了一组未知输入观测器(UIOs),通过将故障视为未知输入来检测故障。当通过将剩余评估函数与阈值进行比较来检测到故障代理时,将其从网络中移除。[41]中提出的方法只有在存在单一附加故障时才是可行的。基于[41]中的分析结果,在[46]中研究了具有多个故障的网络动态系统的分布式故障检测,其中揭示了代理检测故障所需的最小信息量。分布式未知输入观测器也是在[42]中为一类离散时间高阶系统设计的。降阶未知输入观测器也应用于高阶MASs,如[43]所示。必须指出,匹配条件是对那些观察者的直接限制,例如,。秩(CE)=秩(E),其中C为输出矩阵,E为未知扰动的加权矩阵。
在[47]中,讨论了一般高阶线性MASs的分布式故障检测,其中使用相对输出信息来构造观测器。在[44]中,区间观测器是为一类离散时间MASs提出的,这样就可以得到状态观测的上下限,参见下面为第I个代理设计的区间观测器:
其中xiL(k)和xUi (k)分别是集总状态x(k)的上下估计;YiI(k)和YUi (k)分别是Yi(k)的上下估计,其中Yi(k)=Wiy(k),vL(k)和vU(k)分别是未知扰动v(k)的下界和上界;和FLi、FUi、HLi和HUi是由一些扩展的LMIs决定的观察者增益。(WiC) = max{0,WiC},(WiC)=(WiC) -WiC。还构建了下残差信号和上残差信号。然后提出了一种混合的l1和Hinfin;性能指标来计算观测器增益,使得上下残差对干扰的鲁棒性最大化,同时提高了上下残差对故障的灵敏度。所提出的设计方案直接将剩余信号与故障信号进行比较,这可以简化检测过程。
在[48]中,考虑了具有传感器和执行器故障的离散时间线性MASs的故障检测问题。为了协同执行故障检测任务,提出了如下协同检测网络:
其中xij(k)、yij(k)分别是由代理j获得的第I个代理的参考状态和输出,dij(k) = di(k) dj(k)。然后,设计了一组分布式的伦伯格观测器。考虑到设计一个对故障敏感而对干扰鲁棒的故
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[605887],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

