基于透视投影变换矩阵的图像空间坐标提取算法
原文作者:Baolong Zhanga, Jichao Yang, Hongrui Lee 单位:天津大学科技学院
摘要:本文分析了计算机图形学中的三维图形变换及其显示过程,也介绍了图形变换的方法。本文重点分析透视投影变换矩阵理论及其推导,以及介绍图像点坐标系中图像空间坐标的计算方法。
关键词:图形变换;反投影变换;图形坐标系
介绍
近年来,计算机图形学研究领域的热点问题涉及到科学计算可视化、计算机动画与虚拟现实。这个核心是在一个三维图形显示特定的窗口。三维图形变换是该过程的基本内容之一。图形变换是转换三维物体所需的一系列坐标变换,处理后的图像在二维屏幕上呈现出来。它包括了几何图形、投影、裁剪和试图端口转换。
图形变换
三维图形显示的图形变换。计算机处理数字型号和图形以数字信号的形式存储在计算机中,因此坐标是图形和数字之间的一架桥梁。在实际对象的数字化过程中,这个对象的坐标叫做世界坐标系。单位长度的选取通常取一个像素的大小。图形变换是图形的处理过程,通过改变世界坐标系中的观测坐标来显示在计算机屏幕上系统,它包括图形转换、旋转、缩放和投影变换。
透视投影变换矩阵的推导
坐标系。在透视投影变换中,所有点从投影空间中的一个点投影,目标附近的物体产生大的投影,而远离视点的物体产生小的投影,最小的点成为消失点。透视投影的图像变换是基于直接导出空间坐标之间的数学关系的成像模型,该模型分为x轴和y轴,并分别转换。该方法理论上简单,但是在算法实现过程中,由于图像大小不同,该方法对大数据图像的处理速度不能满足实时图形处理的要求[1]。针对这一问题,本文重点研究透视投影变换矩阵的推导。
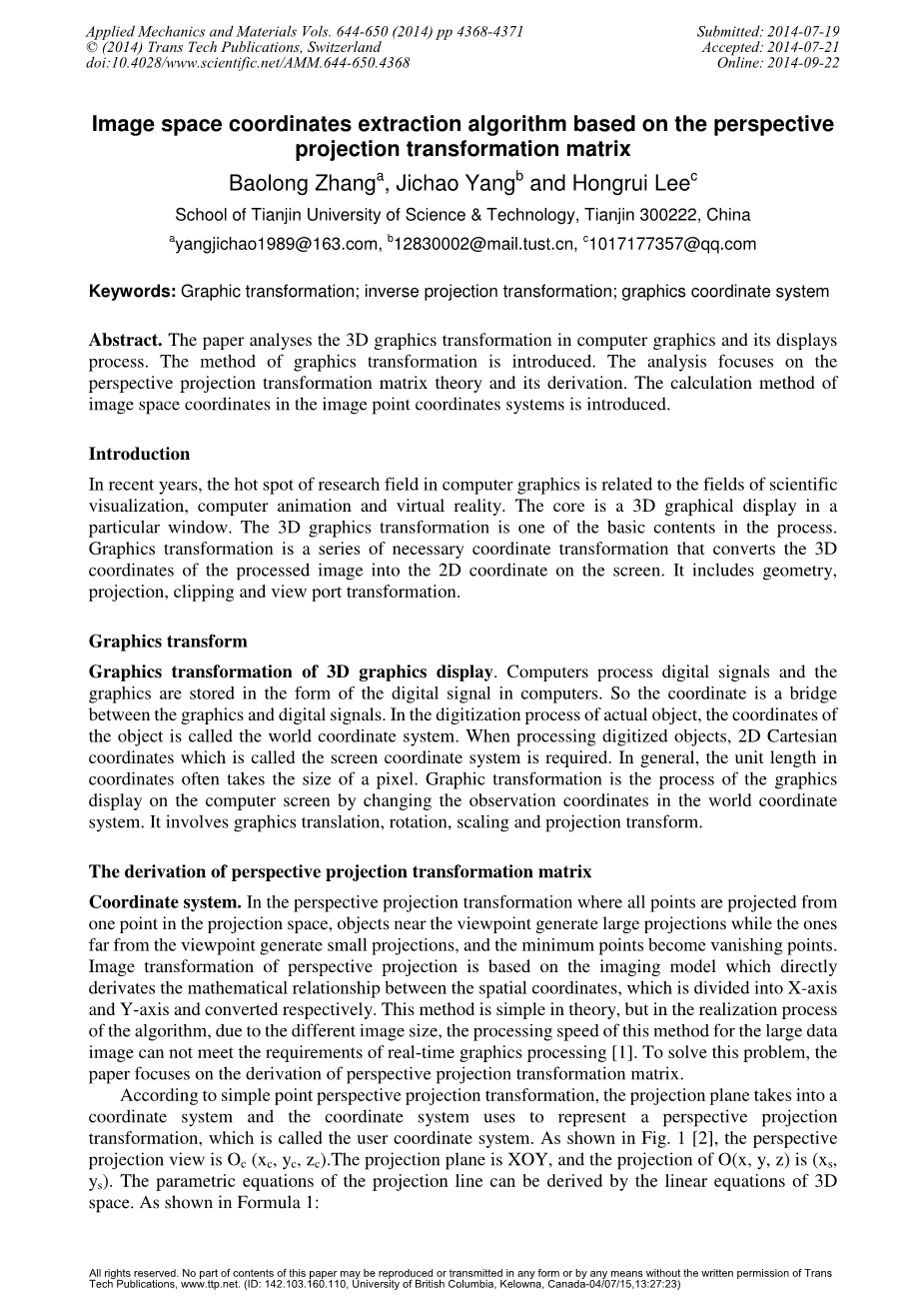
根据简单的点透视投影变换,投影平面进入坐标系,坐标系用来表示透视投影变换,称为用户坐标系。如图1[2]所示,透视投影视图是Oc(xc,yc,zc)。投影平面是XOY,O(x,y,z)的投影是(xs,ys)。投影线的参数方程可以由三维空间的线性方程组导出,如方程1所示:
(1)
通过引入属于三维直角坐标系的观测坐标,它是左手坐标系并遵循左手定则。它以人眼为坐标原点,轴遵行左手定则,左手拇指指向z轴的正方向,四个手指指向x轴方向,四个手指弯曲90度的方向是y轴方向。如图1所示,在观察坐标系,用简单点的透视投影变换公式,Oc(xc,yx,zc)是坐标原点(0,0,0),在世界坐标系中的点(xw,yw,zw)是(xe,ye,ze),投影(xs,ys)在投影面上。
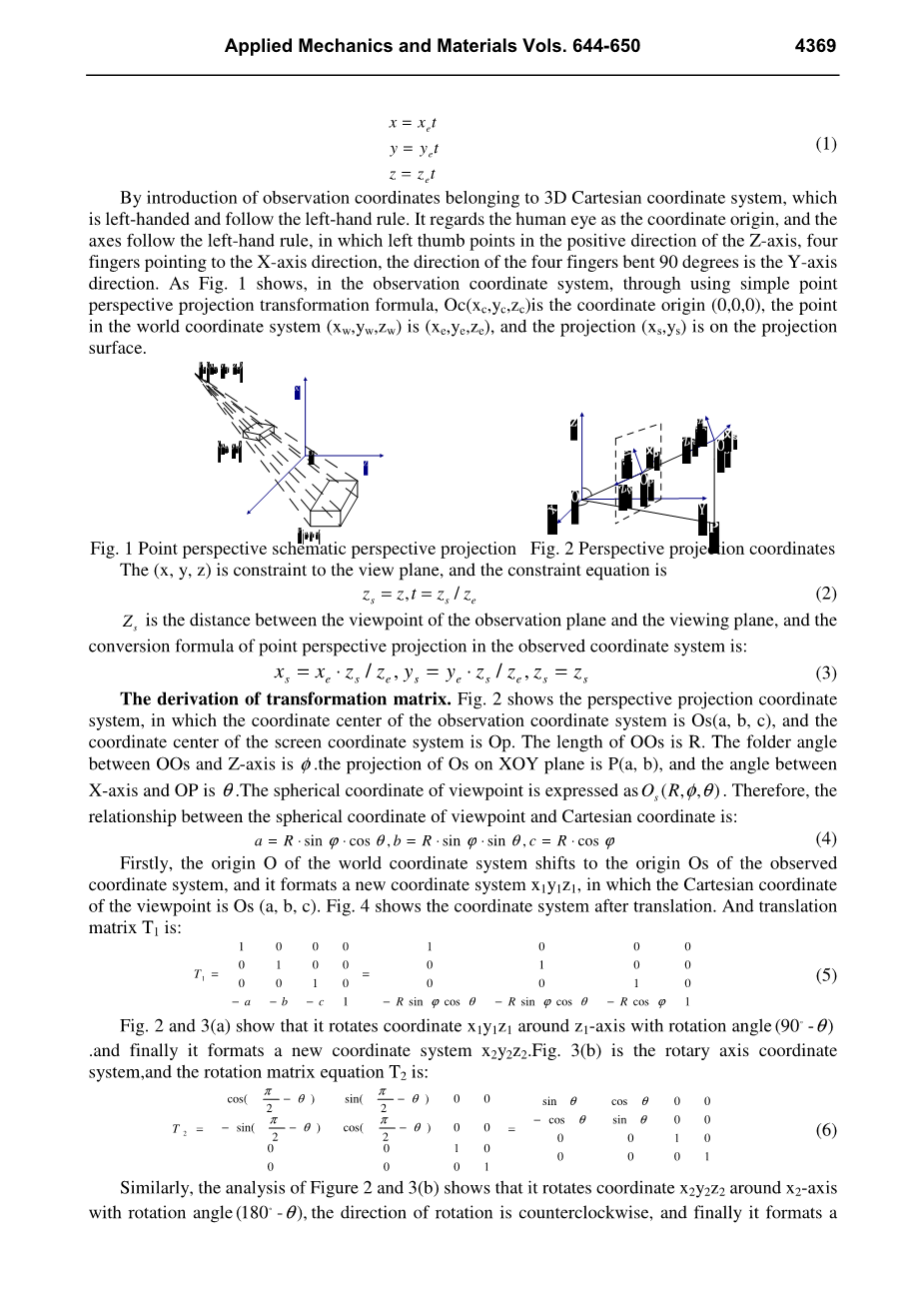
图1 点透视示意图透视投影 图2 透视投影坐标系
(x,y,z)约束于视图平面,约束方程为:
(2)
Zs 是观测面与观察面之间的距离,在所观察到的坐标系中,点透视投影的转换公式为:
(3)
变换矩阵的推导。图2表示了透视投影坐标系,其中观察坐标系的坐标中心为Os(a,b,c),并且屏幕坐标系的坐标中心是Op。OOs的距离是R。OOs和z轴的夹角为phi;。Os在XOY平面上的投影是P(a,b),与x轴和OP之间的夹角为theta;。视点的球坐标表示为Os(R,phi;,theta;)。因此,视点球面坐标与笛卡尔坐标系的关系是:
(4)
首先,世界坐标系的原点O移动到观察坐标系原点Os,并且建立起了一个新的坐标系x1y1z1,其中视点的笛卡尔坐标是Os(a,b,c)。图4表示了翻译后的坐标系,并且翻译矩阵T1为:
(5)
图2和图3(a)表示它围绕z1轴旋转坐标x1y1z1与旋转角度 (90°-theta;),最后将它建立起一个新的坐标系x2y2z2。图3(b)是旋转轴坐标系,旋转矩阵方程T2为:
(6)
同样,图2和图3(b)的分析表明,它围绕x2轴旋转坐标x2y2z2,其旋转角度为(180°-theta;),旋转方向为逆时针方向,最后得到一个型的坐标系x3y3z3。等式7是旋转矩阵T3。X3轴反射在y3Oz3表面上。等式8是反射矩阵T4,图3(c)和3(d)表示出坐标系的变换。
因此,从世界坐标系到观测坐标系的变换矩阵为T=T1*T2*T3*T4,矩阵变换公式为[x sys zs 1] = [x y z 1]*T,其展开式为:
图3 从世界坐标系到观察坐标系的转换
如图4所示,观察坐标系和屏幕坐标系都是左手坐标系,并且z轴的方向一致。视点d是视点Op与视线中心Op之间的距离。假设观察坐标中的物点为P0(xs,ys,zs),并且视线OsP0和屏幕之间的交点为Pp,根据几何关系,有以下关系:
图4 从观察坐标系到屏幕坐标系的转换
以上分析可以得到从世界坐标系到屏幕坐标系的复合变换矩阵Tt=T*Trsquo;。根据公式9和公式10,可以在坐标平面上获得(xs,ys)。
a. 实验平台 b. 鱼眼收集的图
c. 鱼眼图像矫正 d. 图像反投影变换
图5 实验结果
结论
为了验证理论,实验中使用了超广角鱼眼镜头,其视角为210度。测试平台如图5所示,测试按照汽车模型安装中间前方30度摄像机角度测试,距离地面高度为21厘米。
上面的图片展示了图像处理和超广角鱼眼图像失真需要纠正。根据透视投影变换理论,对图像进行了校正,并将各种类型的插值算法与图像处理中的分析进行了比较。最后,选择双三次插值算法进行图像插值并获得实验结果。
参考书目
[1] D. Wu, W.Q. Huang and Y. Wang: 水文测量和制图, Vol. 23 (2003) No.1, p18.
[2] J.G. Sun and C.G. Yang: 计算机图形学 (清华大学出版社, 1996).
[3] Q. Xu: 三维地形可视化技术 (测绘出版社, 2000).
[4] F.L. Wang: 图像乘法中插值法的研究 (PhD, 云南大学, 2005).
[5] A.Z. Zhang and Z.L. Liu: 微电子学和计算机, Vol. 24 (2007) No.1, p.49.
外文文献出处: Baolong Zhang, Jichao Yang, Hongrui Lee, Image space coordinates extraction algorithm based on the perspective projection transformation matrix [J]. Applied Mechanics and Materials, 2014, (Vols. 644-650): 4368-4371.
附外文文献原文
不同坐标系间数据转换的组合方法
原文作者:Yang Yuanxi Xu Tianhe 单位:西安省测绘科学研究院
专业:数学与应用数学(师范) 学生姓名:郑恩涛
指导老师姓名:尤英
摘要:不同坐标系之间的相似变换模型不够精确,无法描述它们之间的差异。因此,坐标系的坐标变换精度较差,精度不能保证高精度的转换。本文提出了一种相似变换与回归逼近相结合的方法。考虑到局部误差的累计,本文采用了推荐的方法提高了坐标系的精度。
关键词:坐标系变换;相似变换;回归近似
1 引入
因着GPS、VLBI与SLR定位精度的提高,新国际地球参考系中坐标点的精度达到了厘米的量级。此外,坐标点的精度是均匀的,三种空间技术并没有明显的误差累计。在像中国这样的发展中国家,传统的大地测量网仍然在为测绘、工程设计、设计和军事应用等领域工作。这些点的坐标一般是基于北京-54或北京-80数据系统。为了将不同的大地测量网络统一到相同的基准系统中,相似的搜索模型,如Bursal模型、Molodensky模型或Veis模型都是常用的。这种模型通常包含三个平移、三个旋转和一个尺度参数。从两个不同的基准点(至少3个点)计算出的7和转换参数可用于两个数据系统之间的转换。
事实上,在经典的大地测量网络中,在点的坐标中必然存在局部变形,因为它受到一些当地地球物理因素的影响,例如地球地壳运动和局部大气扰动。此外,经典的大地测量网络也受到累计误差的影响。因此,在不同基准系统之间的相似变换后,残差可能打到米的数量级。考虑到经典大地测量网络的局部变形,一些学着提出了用Hotine模型、Krakiwsky-Thomson模型和Vanicek-Wells模型等两组旋转参数的坐标变换模型。使用这些模型有两个问题。①由于引入了额外的旋转参数,因此将会产生一个等级不足的转换模型,在计算中通常需要额外的约束。②新加入的旋转参数只考虑平均旋转,但不能控制大地测量网络的局部畸变或累计误差。基于以上原因,两组旋转参数的坐标转换模型很难保证变换后坐标点的精度。一些学者提出了一种基于鲁棒估计的坐标变换方法,该方法具有较高的击穿点来控制输出点对变换参数的影响。通过这种方法,我们可以得到可靠的变换参数,但对局部系统误差却无能为力。为了将局部系统误差考虑在内,提出了一种新的变换参数基准变换模型。
需要指出的是,不同基准系统之间的差异主要来自于定义的差异,即坐标原点的差、坐标轴的方向以及尺度的差异,这应该首先在数据转换中考虑。在作者的工作基础上,可以在相似变换后进行多项式拟合,以减少残差,从坐标系中得到高精度的坐标变换,精度不高,在变换后达到较好的一致性。本文提出了一种相似变换与回归逼近相结合的方法。
2 相似变换与回归逼近相结合的方法
相似变换模型如下所示:
其中[Xi Yi Zi]TN和[Xi Yi Zi]TN分别表示新的和旧的第i个点的坐标向量,[x0 y0 z0]T是变化向量,εx, εy和εz为三个旋转参数,k是规模参数。根据式子(1)可以将误差方程写成:
其中
等式(2)也可以表示为:
V=AT-W (4)
然后我们得到了参数向量T的最小二乘估计量:
T=(ATPA)-1ATPW (5)
其中,P是由WXi,WYi和WZi的方差决定的权重矩阵。假设在经典的大地测量数据中,有系统误差、累积误差或局部畸变,因此很难将这些局部系统误差与相似变换模型的7个参数相匹配。因此,局部系统误差将反应在公共点的残差上。为了客服这些问题,我们试图将这些错误的共同点。
共同点的坐标分量的残差可以表示为:
其中,B和L分别表示大地纬度和精度(在弧中),alpha;ij是系数。类似的,可以得到表达式VYi和VZi。等式(6)类似于变量数据转换方法。等式(6)中的观测是在相似变换后的坐标分量的残差。误差方程可以从式(6)得到:
其中gamma;Xi表示VXi的残余。最小二乘估计的系数向量alpha;是:
其中B是一个ntimes;k的矩阵,VX是一个列向量。它们可以如
剩余内容已隐藏,支付完成后下载完整资料
英语原文共 10 页,剩余内容已隐藏,支付完成后下载完整资料
资料编号:[279571],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。

