
英语原文共 14 页,剩余内容已隐藏,支付完成后下载完整资料
涡轮机替代减压阀的泵的选择和位置
摘 要
压力控制是供水系统安全运行的基本组成部分,主要是为了减少泄漏,中断风险和维护成本。 系统拓扑结构和地形可以定义高压区域,通常使用减压阀(PRV)来维持这些区域的标准压力。 但是,流体中的所有可用能量都会通过水头损失消散。可以使用涡轮机代替 PRV 来产生电能和 控制压力。建议使用泵作为涡轮机(PAT),以降低投资成本。由于全天动态运行,PAT 在流量 和扬程变化的条件下运行。这种变化会影响效率和头损失,这使得很难通过传统方法来选择 PAT 来替代 PRV。因此,本文提出了一种选择方法。该方法基于最大限度地限制系统压力极限所产生 的能量。为了解决此选择问题,使用了粒子群优化(PSO)的优化技术,并使用了完整的泵曲线 来模拟 PAT。此外,此方法还可以识别网络上安装 PAT 的最佳位置。
关键词 涡轮机用泵;能源回收;能源效率;粒子群优化
引言
出于经济和环境原因,合理利用自然资源变得越来越重要。 供水系统的效率对于城市的可持续发展至关重要,因为次优 运行会增加泵站的能耗并增加网络的泄漏。气候,社会和政 治因素影响用水量,进而影响供水系统的运行。在这种情况 下,出现了智能水网络的概念,该智能水网络通过现场测量 和数学建模,可以快速做出决策,从而确保优化的高质量运 营[1]。
压力控制是优化网络运行的最重要问题之一。重要的是减少 泄漏量并避免管道中断。系统的地形和拓扑定义了高压和低压 区域。技术标准确定了操作可接受的最大值和最小值。在巴西, 巴西技术标准协会(ABNT)将供应网络中的压力设置为 10 m
(动压)和 50 m(静压)[2]。在低压区域,可以安装带变 频器的增压器,以保持网络上适当的压力。对于高压区域, 通常使用减压阀(PRV)来维持入口区域的足够压力,并在关 键节点上维持所需的最小压力。几项研究探索了优化的 PRV 操作及其位置,从而将泄漏损失降至最低[3-5]。
但是,从能量的角度来看,PRV 会耗散压力能量,给系统 增加了局部损失。这种能源损失与合理利用资源的现代原则 背道而驰。在我们的新范例中,可以使用能量压力来驱动与 发电机相连的涡轮机,从而发电并维持该部门的减压承诺。 由于在这样的场所发现功率低,使用常规涡轮机是不可行的 [6-8]。开发了专门在配水网络条件下运行的涡轮机,试图对 用户保持足够的压力。但是,这些涡轮机尚未大规模制造, 因此难以直接使用。 一种替代方法是使用泵作为涡轮机(PAT),其成本低且效率高[9]。在 PAT 和 PRV 之间显示出 类似的行为,表明该解决方案的可行性。但是,[10,11]进行 了广泛的模拟,并观察到在低耗期间,PAT 无法插入足够的水头损失以将压力降低至可 接受的标准[12]。在伊朗的一个系统中,PAT 和 PRV 之间的响 应类似,但一天中的需求变化不是很明显[13]。作为改善压力 控制的替代方案,建议使用变速 PAT 或并行添加 PRV,而[14] 建议根据每日消耗量的变化,并联多个PAT以不同的方式运行。
尽管使用 PAT 有很多优势,但为此目的选择机器非常复杂。 传统方法,例如参考文献中提出的方法。[15-18]仅对泵的最 佳效率点(BEP)有效。如果不知道特性曲线(扬程 x 流量), 就无法评估网络的优势,因为根据消耗量,可用扬程范围很 广[19]。结合了能源生产的经济效益和系统灵活性,以定义 PAT 的最佳运行。此外,PAT 操作不仅必须寻求能源生产,而 且还必须寻求压力控制[20]。使用模拟退火优化技术来定位 和定义供水网络中五叶片管状螺旋桨的工作点。
再次背景下本文提出了一种PAT选择方法和供水网络运营中的位置。该方法基于最大化由产生的能量和减少的泄漏量代表的利益。作为操作约束,该方法要求 PAT 应该能够保持
在既定范围内对网络的每个节点施加压力。通过基于粒子群优化(PSO)的优化过程来设置机器的 BEP 及其位置。
从这些值中,选择最接近的可用曲线即可获得机器的特定速 度。为此,参考文献中找到了一组完整的泵特性曲线。[21] 并在苏特计划中使用。在最后阶段,使用选定的机器对网络 进行仿真,以计算产生的能量和节点压力。该方法适用于参 考文献中提供的三个虚拟网络。[22,23],并将结果与 PRV 操
作进行比较。
2 泵作为涡轮建模
2.1 “管道 PAT”边界
可以使用几种方法对供水网络进行水力模拟,尤其是目前广 泛使用的梯度法。在本文中,使用 Refs 提出的特征方法(MOC) 通过瞬变流方程解决稳态问题。[24,25]。尽管需要更长的处理 时间(对于小型网络而言这是微不足道的),但是该模型允许 对系统动态行为的未来研究进行简单的更改。将连续性定律应 用于通用节点,如图 1 所示,并使用 MOC 正线计算会聚管道处 的流量,而使用分叉管道的负线,则获得节点通用方程式(公 式(1))。
CA [m],BA [s / m2]-MOC 正线的系数;
CB [m],BB [s / m2]-MOC 负线的系数;
CP [dimensionless]-连接到该节点的收敛管道的数量;
DP [dimensionless]-连接到节点的分支管道的数量;
HN [m]-节点头;
Qe1 [m3/ s]-流经非管道元件
为了获得最佳的 PAT 安装位置,将创建一个非管元素,称为“ Pipe PAT”。该元素考虑在管道上游节点之后立即存在 PAT。 一种
创建了一个虚拟节点以将 PAT 与管道连接,如图 2 所示。因此,优化算法将搜索管道
具有安装 PAT 的最佳条件的识别号,并用此元件替换管道。该 算法还考虑了下游节点和上游节点之间反转的可能性。如果流 动方向相反,则将元件从网络断开,仅使用管道保持原始状态。 此过程模拟旁路,可以在 PAT 操作不可行的时期使用旁路。
使用节点的 N1 和 Nt 通用方程,可以得到非管道元素的通 用方程( 公式( 2 ))。 要确定三个变量( HN1 , HNt 和lt;Jet),必须使用边界条件来求解该方程。在这种情况下,使用水头和水流的特征曲线。
2.2. 泵特性曲线
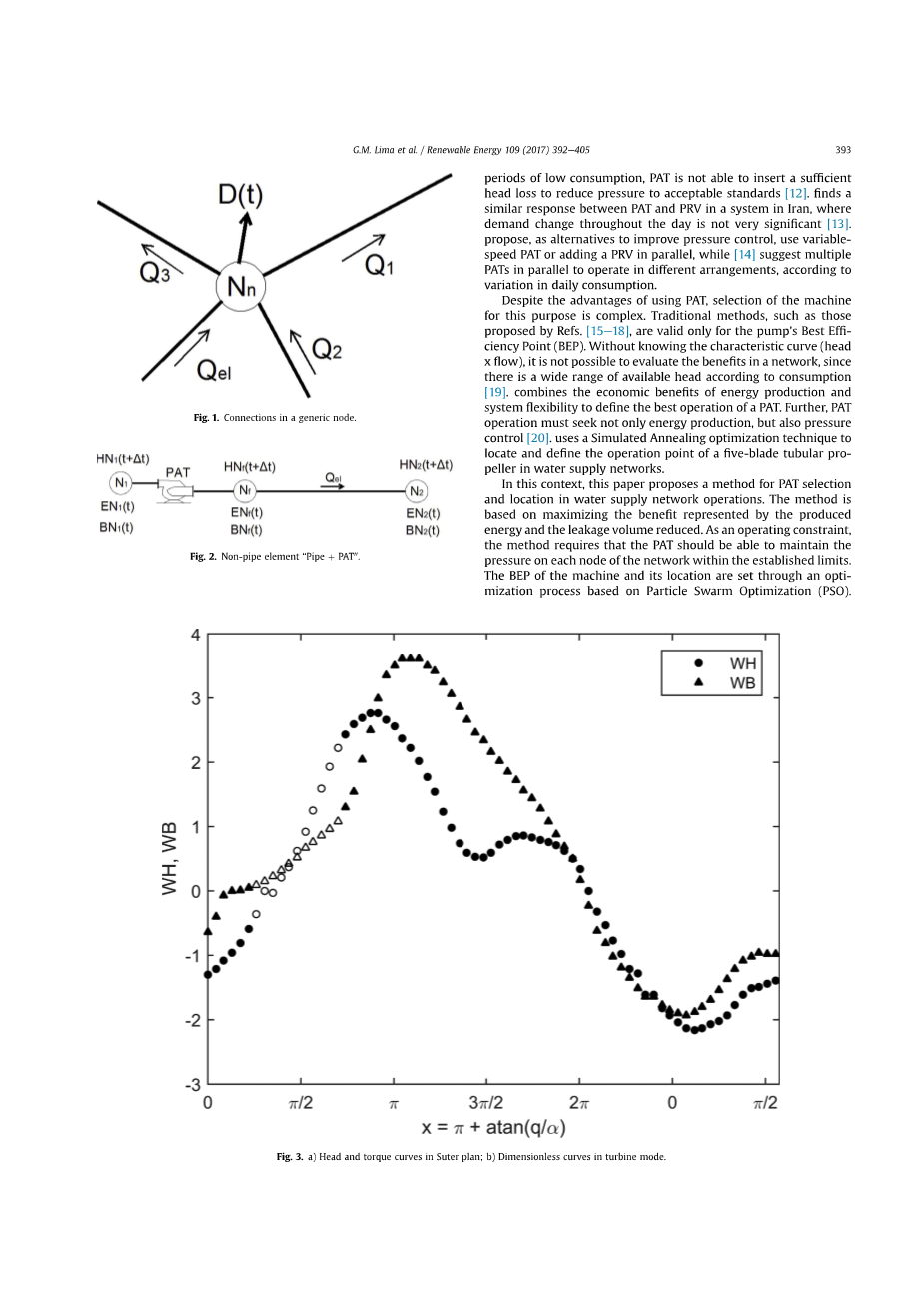
通过曲线来表征液压机有关扬程,流量,扭矩和速度。这些参数的符号交替定义了 八个不同的操作区域,其中可以由苏特计划[26]来表示。图 3-a 显示了参考文献中可用 的 14 条曲线的示例。[21]。空标记将运行区域显示为涡轮。 对于每条可用曲线,确定该工作区域,并考虑额定转速,获 得与流量 q 和水头 h 的无量纲系数相关的新曲线,如图 3-b 所示。这种新的表示方式允许调整功率曲线(公式(3))。 因此,仅使用 BEP 机器,即可使用涡轮机获得其在涡轮模式 下的特性曲线具有最接近比旋转的无量纲曲线。
其中:
a,b [无量纲]-曲线调整系数;
h [dimensionless]-头系数;
q [无量纲]-流量系数。
PAT 选择和定位程序
PAT 的选择和位置是根据通过产生的能量和减少的泄漏量来最大化收益。因此,考虑
到能源和水费,目标函数写为:
其中:
惩罚函数基于问题约束。在这种情况下,所有节点必须在 24 小时内保持最小压力。因此,可以使用公式(5)计算惩 罚函数。惩罚系数对于以生物启发算法获得准确结果非常重 要。根据[27],惩罚函数既不能太硬,从而避免在整个空间 中进行广泛搜索,又不能太软,从而导致不可行的解决方案。 因此,采用了 100,000 的价值作为惩罚系数。
其中:
[$ / m]-罚款系数(采用的值为 100,000);
Pij [m]-节点 j 在时间 i 中的压力;
Pmin [ml-建立的最小压力。
为了解决上面提出的优化问题,我们使用基于组的行为
(PSO)的元启发式技术。选择该技术是因为其健壮性和易于 实施性。根据[28],搜索过程基于鸟类的行为,鸟类会随机 发起食物搜索,但是会迅速组织并创建集体搜索模式。该技 术用于解决水分配的各种优化问题 网络,例如最佳设计[29,30],水泵调度[31J, 瞬态保护装置的尺寸和位置[32],以及许多其他装置,在快速 收敛的情况下显示出良好的效果。
随着时间的推移(迭代次数),每个粒子的位置矢量 X 和速 度 V 会根据其惯性,有史以来的最佳位置 P 和由群 G 所找到的 最佳位置进行更新。在式(6)和(7)中,每次迭代都会找到 一个新的解。图 4 总结了 PAT 选择和定位的过程。
其中:
V [m / s]-粒子速度;
X [m]-粒子位置;
P [m]-粒子的最佳位置;G [m I-组的最佳位置。
每个组成部分的无量纲加权系数由以下公式给出:惯性系 数 w,对应于粒子保持其实际方向的能力;认知系数 CJ 代表 粒子记忆,使粒子达到已经访问过的最佳位置;社会系数 c2 代表该群体的影响力,将粒子带到该群体找到的最佳位置。 较高的 CJ 值会导致更好的全局搜索,而当 c2 增加时,可以 更有效地完成本地搜索。在本文中,这些系数通过迭代进行 调整,其中 CJ 以较高的值起始并减小,而 c2 具有相反的行为,以很小的价值开始。
4. 结果和讨论
为了评估提出的方法,参考文献提出了三个虚拟网络。 [22,23],进行了研究。对这些网络进行了研究,以实现最佳 的区域计量区(OMA)配置和 PRV 位置,最大程度地减少了水 的流失,使其成为一个良好的比较 PAT 位置结果的示例。根据文献[33],压力管道中的泄漏 模型类似于孔板,可以通过公式(8)进行推广。指数 N 取决 于孔板面积。在这项工作中,泄漏行为被认为等于孔口,N 等 于 0.5。每个案例研究都要调整 K 值,以将失水率保持在 30% 左右,这是巴西供水网络中观察到的常见值[34]。因此,除了 需求之外,在每个节点中还增加了由公式(8)计算出的泄漏 贡献。该程序允许比较 PRV 在泄漏控制中的 PAT 性能。在这种 情况下,关键节点的最小压力为 10 m,这由 ABNT [2]确定。
其中:
Qi [1 / s]-泄漏流量;
K [l / sm12]-泄漏系数;
N [dimensionless]-泄漏指数; Pn [m]-节点压力。
4.1. 例子 1
Ref 创建的第一个网络。文献[22]有 12 条管道和 10 个节 点,由一个油箱提供,如图 5 所示。定义 PAT 位置很简单, 因为通过在油箱之后安装机器即可获得最大动力,这也确保 了最佳的压力控制,因为所有节点都在同一高度。尽管如此, 还是采用了建议的方法,将第一条管道确定为安装 PAT 的理 想位置,如图 5 所示。
从优化问题中删除 PAT 位置,并考虑安装了机器的第一条 管道,可以绘制问题目标函数的代表面。图 6-a 显示了由于 压力违规而没有受到惩罚的表面。注意,这是一个平坦的表 面,因此易于学习。但是,当使用惩罚函数时(图 6-b), 表面上会出现主要的障碍,这阻碍了搜索过程,这正说明了 对诸如 PSO 之类的强大优化技术的需求。
使用在 PAT 安装位置上找到的相同位置,使用出口压力恒 定的 PRV 进行新的仿真,出口压力恒定为 33 m,在最大消耗 期间为关键节点供电。表 1 示出了在每种情况下获得的结果。 请注意,当有更多能量可用时,PAT 被选择为在较高的消耗 时间(7-24 小时)内运行。
在此期间,PAT 行为类似于 PRV,如图 7 所示。但是,当能耗下 降时,就不会产生能量,压力仍然很高。因此,减少泄漏的 PAT性能仅占 PRV 结果的 39.94%。 为了改善 PAT 压力控制,选择第二台机器在 1--6 小时内 并行运行。表 1 显示了此新方案的结果。图 7 显示了在此期间压力控制的显着改善。尽管能量产生和泄漏控制得到改善, 但 PRV 仍继续显示出更好的压力控制。图 8 比较了每种情况 下的临界节点压力,其中可以详细观察到低消耗时间所描述 的问题。
4.2. 例子 2
参考文献提供的第二个网络。[23]由 24 个管道和 17 个节 点组成,以水库作为水源(图 9)。首先,仅选择一台机器 来执行压力控制。选择储液罐后紧接 PAT 的管道,因为该位 置可以降低整个网络的压力,并在能源生产中使用最大流量。 但是,观察图 10 所示的压力区,可以确定两个压力稍有不同的区域:第一个区域的平均压力为 17.2 m
第二个为 21.6 m,表明有可能使用其他机器。因此,进行了新的选择
考虑使用两台机器,获得图9所示的配置。在这种情况下,由 于通过节点 4 和 9 的流量对第二个 OMA 的压力影响很小,因此 网络被分为两个 DMA。这种配置改善了能量产生并减少了泄漏。这也是 Ref。提出的相同配置。[23],他还建议关闭节点 4 和 9之间的管道。
表 2 显示了考虑一个和两个 PAT 的 PAT 选择和定位结果。请注意,减少泄漏的效果比产生能量要多。可以解释这一事 实的原因是 PAT 1 的压头减小,具有更高的潜力。PAT2仅使用总流入量的一部分,贡献较少的能量。如在示例1中观察到的,当能量产生和泄漏减少较高时,考虑最大消耗时间 来选择机器的工作点。请注意,PS0优化算法中的粒子数量 很大,以避免局部最小值过早收敛
图 11 显示,
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[607011],资料为PDF文档或Word文档,PDF文档可免费转换为Word
课题毕业论文、文献综述、任务书、外文翻译、程序设计、图纸设计等资料可联系客服协助查找。
您可能感兴趣的文章
- 三维荧光的应用:天然有机物在天然水和水净化系统中的表征外文翻译资料
- 高吸附性和可再生磁性TiO2去除水中天然有机物(NOM)外文翻译资料
- 纳米氧化铁对磁性粉末活性炭吸附有机物的影响外文翻译资料
- 膜技术和环境保护中的水处理外文翻译资料
- 控制湖泊沉积物长期磷外流的因素:探索性反应传输模型外文翻译资料
- 为沿海岸线的货运码头的废水和污水处理提供适当的解决方案:重点分析班达尔码头外文翻译资料
- 过氧乙酸去除废水中合成17a-乙基雌二醇避孕激素的效果评价外文翻译资料
- 家用热水太阳能储罐在运行期间的散热性能操作外文翻译资料
- 波兰农村太阳能生活热水系统在减少温室气体排放方面的潜力外文翻译资料
- 温和气候条件下多管ICS太阳能热水系统的实验研究外文翻译资料

