英语原文共 8 页,剩余内容已隐藏,支付完成后下载完整资料
一种基于直接位移的非弹性结构抗震设计方法
薛强*
中国工程咨询公司土水利工程研究中心,南京东路171号。5,台北105,台湾,中华民国
2000年9月18日收到;已于2001年4月26日收到经修订后的表格;2001年4月27日接受
摘要
本文提出了一种简单但有效的基于位移的地震设计程序,该程序不包含假设线性行为和非线性阻尼响应的替代结构。它是基于由容量谱方法得到的使用纽马克-霍尔减少因子的公式。当将这种方法应用于一个新的设计时,不需要绘制频谱。从推导出的 公式中,清楚地显示了目标位移与结构的刚度、延性和强度要求之间的密切关系。在这样的初步设计过程中,可以很容易地考
虑多个性能目标,并可以扩展到采用有效SDOF系统思想的MDOF系统。 2001爱思唯尔科学有限公司。保留所有权利。
关键词:基于位移的地震设计.能力谱方法.基于性能的设计
- 介绍
工程[1]强调结构系统在严重地震地移和力下的非弹性行为,被认为是最合适和最直接的性能或损伤指标。变形控制设计[2]可以通过使用传统的基于力/强度的 设计程序以及检查位移/漂移限制或采用直接的基于直 接位移的设计程序来实现。
基于位移的设计思想产生于大约四十年前。Gulkan and Sozen[3]发展了替代结构的概念,通过假设线性行为的等效弹性模型和等效于非线性响应的粘性阻尼来估计非线性结构响应。Kowalsky等[4]人最近采用了这一想法,用于SDOF钢筋混凝土结构的直接位移设计,Priestley等[5]人也采用了这一想法,将其应用于的桥梁和建筑中。Calvi和Kingsley[6]还提出了另一种基于位移的多自由度桥梁结构程序,尤其适用于对称桥梁。Court和Kowalsky[7]根据Newmark和Hall提出的等位移规则,为周期较长的建筑物引入了等位移设计(EBD)程序。Qi和Moehle[9]提出了多自由度系统基于位移的程序,要求进行初步设计,并根据位移或漂移极限对设计进行进一步修改。Wallace[10]、Anderson[11]和Dazio[12]等专注于墙体系统,而Panagiotakos和Fardis[13]则对受地震和非地震作用的多自由度钢筋混凝土结构实施了基于性能的变形控制总体设计。Fajfar[14]基于能力谱法[15~18]提出了另一种基于直接位移的设计方法。该方法是所谓N2法的反向程序,用于确定地震需求。
上述研究中,抗震需求被定义为位移谱(D-T格式)或加速度-位移反应谱(A-D格式)。对于通用谱,结构系统的非线性非弹性行为可以通过等效弹性反应谱[19]或非弹性反应谱[2,20~22]来解释。前者与有效粘滞阻尼相关,后者直接基于折减系数和延性之间的关系构建。虽然弹性加速度设计谱可从规范中获得,但它不适合作为确定弹性位移设计谱的基础,因为即使在较长的周期内,产生的位移也会随周期增加。弹性位移设计谱的合理特征正在研究中[23,24],并非本文的研究重点。
本文未采用替代结构的等效弹性模型。SDOF系统的拟定程序基于一些简化公式,这些公式源自ADRS格式谱,采用基于容量谱方法的纽马克-霍尔折减系数。明确强调了在一定地震动下目标位移与结构刚度、延性和强度要求之间的密切关系。 该程序可应用于采用有效单自由度系统思想的多自由度系统。
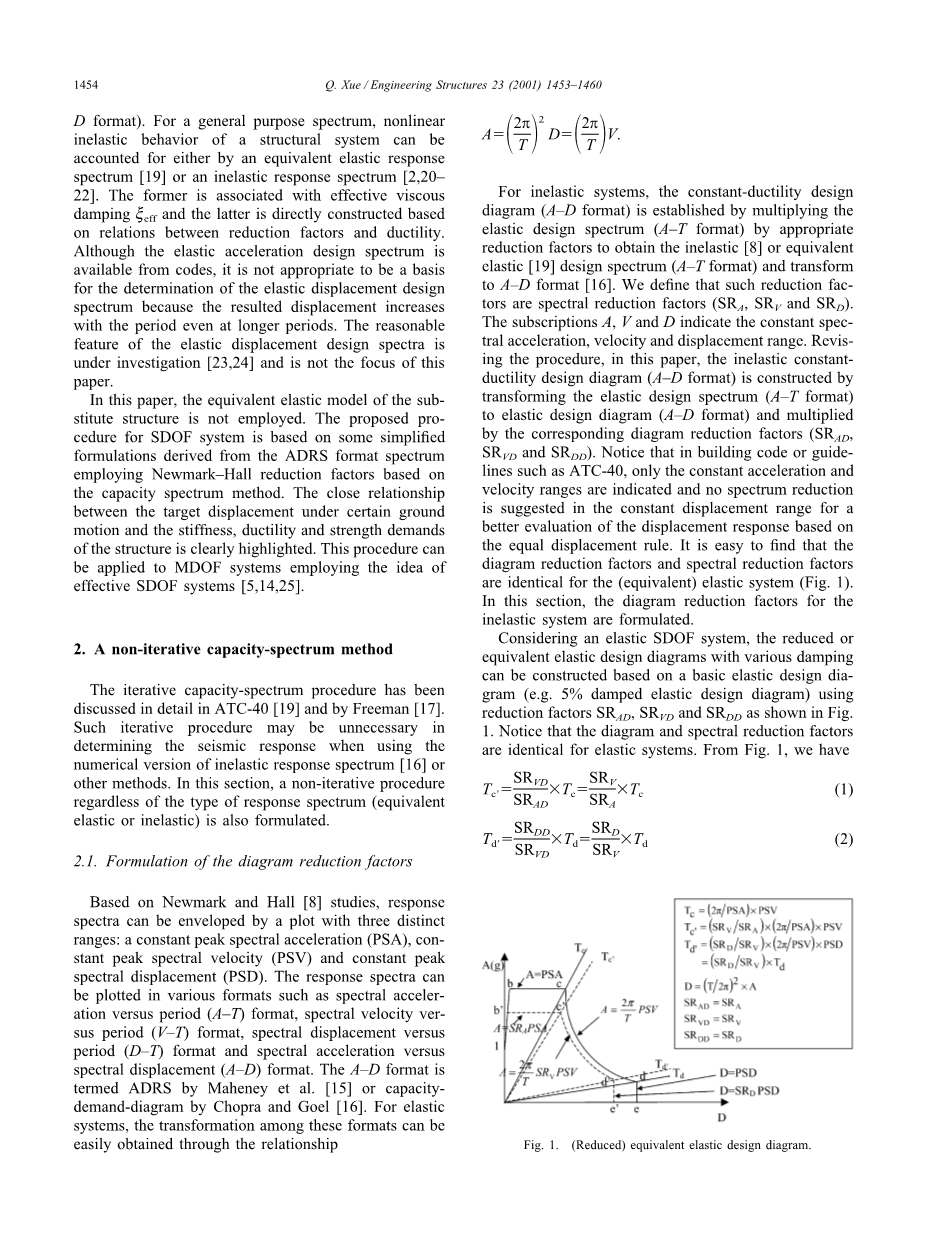
根据Newmark和Hall[8]的研究,反应谱可以由三个不同范围的曲线包络:恒定峰值谱加速度(PSA)、恒定峰值谱速度(PSV)和恒定峰值谱位移(PSD)。反应谱可以多种格式绘制,如谱加速度与周期(A-T)格式、谱速度与周期(V-T)格式、谱位移与周期(D-T)格式以及谱加速度与谱位移(A-D)格式。Maheney等人将A-D格式称为ADR,Chopra和Goel将其称为容量需求图。对于弹性系统,可以通过关系轻松获得这些格式之间的转换:A=
对于非弹性系统,将弹性设计谱(A-T格式)乘以适当的折减系数,以获得非弹性设计谱(A-T格式)或等效弹性设计谱(A-T格式),并转换为A-D格式,从而建立恒定延性设计图(A-D格式)。我们将这些折减因子定义为光谱折减因子(SRA、SRV和SRD)。订阅A、V和D表示恒定的谱加速度、速度和位移范围。通过修改程序,本文通过将弹性设计谱(A-T格式)转换为弹性设计图(A-D格式),并乘以相应的图折减系数(SRAD、SRVD和SRDD),构建了非弹性恒导设计图(A-D格式)。请注意,在建筑规范或指南(如ATC-40)中,仅指示恒定加速度和速度范围,不建议在恒定位移范围内减少频谱,以便根据等位移规则更好地评估位移响应。很容易发现(等效)弹性系统的图解折减系数和谱折减系数是相同的(图1)。在本节中,制定了非弹性系统的图表折减系数。
考虑到弹性单自由度系统,可以在基本弹性设计图(例如5%阻尼弹性设计图)的基础上,使用图1所示的折减系数SRAD、SRVD和SRDD,构建具有各种阻尼的折减或等效弹性设计图。可以注意,弹性系统的图和谱折减系数是相同的。
也得到了:
(3)
(4)
(5)
从图1可以看出c和crsquo;分别是基本和简化弹性设计图中恒谱加速度区域与恒谱速度区域的交点,其中,PSA、PSV和PSD分别是5%阻尼弹性设计谱的恒定峰值谱加速度、速度和位移。
对于非弹性SDOF系统,根据参考文献[26]中Dy和Ay的定义,非弹性系统的Ay–Dy图(图2中的虚线段b*~crsquo;~drsquo;~ersquo;)与图1所示的等效弹性系统的A-D图一致。值得注意的是,图1中的Tcrsquo;大于Tc,因为 SRV大于SRA适用于ATC-40中的等效弹性系统,而图2中的Tcrsquo;小于Tc,因为Newmark–Hall非弹性谱折减系数1/micro;=SRV<SRA=1/代表micro;大于1。因此,根据5%阻尼弹性设计图和与谱折减系数相同的图折减系数,建立Ay–D图。最后,相应的Ay–D图(D=micro;times;Dy)绘制在与b*段相同的图中b*~c*~d*~e*。在该图中,替换为等式(3)-(5),我们得到:
Ac*=Acrsquo;=Actimes;SRA(6)
Dc*=mu;times;Dcrsquo;=mu;times;Dtimes;Dc(7)
Dd*=mu;times;Dd rsquo;=mu;times;SRDtimes;PSD (8) 映射图中b*~c*~d*~*e*段
图中分别为b、~c、~d、~e。1.使用新的减少因子SR AD, SRvd和SRd因此,并参照方程式和等式(3)-(5),我们得到Ac*=Actimes;SR AD(9)
Dc*=Dctimes;
Dd ,=SRdtimes;PSD (11)
比较方程(6 )-(8)和方程(9)-(11) ,
(12)
(13)
(14)
因此,图中的非弹性设计图。2可以一步构建为图中的 简化等效弹性设计图。1.换句话说,非弹性设计图和 等效弹性设计图可以通过利用所开发的图缩减因子方 程式。(12)-(14)的非弹性设计图和频谱减少等效弹性谱的因子。1 )接下来,我们尝试定义交点b*,c*和图中的d*。2. 根据参考文献。[26],
Tb*=Tb(15)
考虑到图中的c*。2与图中的c一致。1、我们重写等式(1)通过使用图表减少因子SRvd而不是SRvd和替代等式(13). 因此
Tc*=(16)
(17)
(18)
因此,图中的非弹性设计图。2现在可以用与等效弹性设计图相同的方式建立(图。1)使用已开发的图表约简因子等式。(12)-(14)来代替。
2.2 非迭代程序
在能力谱程序中,非弹性系统的能力曲线通常从线性静力分析,由双线性力-位移模型(MDOF系统的底部剪力与顶部位移)表示,并转换为A-D格式(图3(a))。屈服后刚度比为r。屈服点表示为(Aye,Dye)。最终性能点P处的位移延性比为micro;P。因此,给出了性能点处的位移。
Dp=mu;ptimes;Dye
以及性能点A处的频谱加速度
Ap=Aye(rmu;p-r 1)
假设通过性能点的非弹性系统的需求图直接从弹性设计图构造而成。
性能点来自非迭代能力谱方法。上述因素SRAD、SRVD和SRDD。我们可以得出,
Ap=SRvdtimes;(2pi;/Tp)times;PSV(21)
Dp=(Tp/2pi;)times;SRvdtimes;PSV(22)
mu;p=(Tp/2pi;)times;SRvdtimes;PSV/Dye(23)
Tp=(SRvdtimes;2pi;times;PSV)/Aye/(rmu;p-r 1)(24)
mu;p=(SRvd2times;PSV2)/(Dyetimes;Ayetimes;(rmu;p-r 1))(25)
mu;ptimes;(rmu;p-r 1)=PSV2/Dyetimes;Aye(26)
mu;p=PSV/Dyetimes;Aye(27)
Dp=PSVtimes;(Dye/Aye)1/2
Dp=PSVtimes;(Dyetimes;M/Vye)1/2=PSVtimes;T0/2pi;(29)
PSAtimes;SRad=Aptimes;(rmu;p-r 1)(30)
(rmu;p-r 1)(2mu;p-1)1/2=PSA/Aye(31)
Mu;p=((PSA/Aye)2 1)/2(32)
Dp=((PSA/Aye)2 1)/2times;Dye(33)
等式(26)和(31)表明,性能/目标位移、屈服强度和屈服位移密切相关。换言之,目标位移与结构的屈服强度、位移延性和刚度以及现场设计地震动的弹性设计谱密切相关。
3.单自由度系统基于位移的简单设计方法
在基于位移的直接设计中,修改上述程序,我们从目标位移开始,以提供结构的足够刚度、强度和延性。此处介绍的程序适用于SDOF系统,可采用有效的SDOF系统的思想应用于MDOF系统[5,14,25]。
步骤1:指定弹性设计谱图1或图2中的目标位移DP、恒定峰值谱加速度PSA、恒定峰值谱速度PSV和Tc弹性设计谱如图1或图2所示。
步骤2:假设屈服后刚度比r,通常取0.05和塑性比micro;p或屈服位移Dye。
步骤3:根据公式(19)计算屈服位移Dye(如果步骤2中假设为micro;p)或延展率(如果步骤2中假设为Dye)。
步骤4:根据方程式计算屈服层的谱加速度(26)和(31)分别表示为Arsquo; ye和A2 ye。
步骤5:根据公式(16)计算Tc*。此外,根据公式(24)计算TP1,步骤4中Aye等于A1ye。
步骤6:如果TP1ge;Tclowast;, Aye=A1ye;否则Aye=A2ye。
步骤7:系统的设计基底剪力或所需屈服强度Vye=Ayetimes;M,其中M为集中质量。
步骤8:所需的结构刚度或结构周期可以通过:
步骤9:计算构件力例如,对于SDOF系统,设计力矩Mye=Vyetimes;L,其中L是柱高度。
步骤10:根据所需的刚度和强度设计构件尺寸和钢筋。
请注意,步骤5是必要的,以区分图3(a)中所示的情况和图3(b)中所示的情况,以确定步骤6中的屈服强度。有趣的是,从公式(29)中可以很容易地看出,对于理想弹塑性单自由度系统,可以根据选定的目标位移直接估计结构所需的初始刚度或周期。然后,假设不同的位移延性比会导致不同的设计强度要求。这意味着对于给定的目标位移极限,存在多个设计结果。在拟定程序中,micro;p的假设可以基于所使用的结构系统和材料,也可以基于寿命期成本/效益研究。
剩余内容已隐藏,支付完成后下载完整资料
资料编号:[590221],资料为PDF文档或Word文档,PDF文档可免费转换为Word

